BAKALÁŘSKÁ PRÁCE. Lukáš Polcar. Geodetiky v poli porušené černé díry: kde vzniká chaos? Ústav teoretické fyziky
|
|
|
- Antonie Šmídová
- před 6 lety
- Počet zobrazení:
Transkript
1 BAKALÁŘSKÁ PRÁCE Lukáš Polcar Geodetiky v poli porušené černé díry: kde vzniká chaos? Ústav teoretické fyziky Vedoucí bakalářské práce: doc. RNDr. Oldřich Semerák DSc. Studijní program: Fyzika Studijní obor: Obecná fyzika Praha 2016
2 Prohlašuji, že jsem tuto bakalářskou práci vypracoval samostatně a výhradně s použitím citovaných pramenů, literatury a dalších odborných zdrojů. Beru na vědomí, že se na moji práci vztahují práva a povinnosti vyplývající ze zákona č. 121/2000 Sb., autorského zákona v platném znění, zejména skutečnost, že Univerzita Karlova v Praze má právo na uzavření licenční smlouvy o užití této práce jako školního díla podle 60 odst. 1 autorského zákona. V... dne podpis
3 Děkuji vedoucímu své práce doc. Oldřichu Semerákovi za ochotu a pomoc, za mnoho užitečných rad a připomínek, bez kterých by tato práce nemohla vzniknout.
4 Název práce: Geodetiky v poli porušené černé díry: kde vzniká chaos? Autor: Lukáš Polcar Katedra / Ústav: Ústav teoretické fyziky Vedoucí bakalářské práce: doc. RNDr. Oldřich Semerák DSc. ; Ústav teoretické fyziky Abstrakt: Je všeobecně známým faktem, že pohyb kolem Schwarzschildovy černé díry je plně integrabilní. Po přidání disku či prstence však systém ztrácí jednu ze svých symetrií a geodetický pohyb v takovémto prostoročase se v závislosti na parametrech zdroje může stát chaotickým. Cílem této práce je pomocí geometrického kritéria založeného na rovnici geodetické deviace určit, kdy dochází v tomto statickém, axiálně symetrickém uspořádání ke vzniku chaosu a posoudit, zda lze předvídat chaotické chování v obecné relativitě pouze ze znalosti lokálních geometrických vlastností prostoročasu bez nutnosti explicitně řešit rovnici geodetiky. Klíčová slova: obecná teorie relativity, chaos, geodetická deviace, Weylovy prostoročasy
5 Title: Geodesics in the field of a perturbed black hole: where appears chaos? Author: Lukáš Polcar Department: Institute of Theoretical Physics Supervisor: doc. RNDr. Oldřich Semerák DSc. ; Institute of Theoretical Physics Abstract: It is widely known that the motion around Schwarzshild black hole is completely integrable. However, after adding a disc or a ring one of the symmetries of the system is broken and the motion may become chaotic for some values of parameters. The aim of this thesis is to identify where appears chaos in static, axially symmetric spacetime by using the geometrical method based on the geodesic deviation equation. Is it possible to predict chaotic behaviour in general relativity solely from local geometrical properties of spacetime, without explicitly solving the geodesic equation? Keywords: general theory of relativity, chaos, geodesic deviation, Weyl metrics
6 Obsah ÚVOD Základní pojmy teorie chaosu Chaos v klasické mechanice Integrabilní systémy Metoda Poincarého řezů Pohyb v obecné teorii relativity Weylovy prostoročasy Schwarzschildovo řešení Invertovaný disk Morgana a Morganové Bachův-Weylův prstenec Geodetiky ve Weylově prostoročase Geometrické kritérium Výsledky geometrické metody Efektivní potenciál První invertovaný disk Morgana a Morganové Čtvrtý invertovaný disk Morgana a Morganové Bachův-Weylův prstenec Zhodnocení geometrického kritéria ZÁVĚR LITERATURA... 56
7 Úvod Fenomén chaosu je s fyzikou spjatý už od jejího počátku. Chaos, tedy citlivost na počáteční podmínky, se objevoval už v klasické mechanice, a to v tak jednoduchých systémech jako je dvojkyvadlo problém tří těles. Se vznikem nových fyzikálních teorií, které se většinou řídily složitějšími, často nelineárními rovnicemi, se však pozornost zaměřila především na analyticky řešitelné problémy, které zpravidla oplývají vysokou mírou symetrie a nejsou chaotické. Teorie chaosu začala vznikat až ve 20. století, svůj rozkvět zažila také díky prudkému rozvoji výpočetní techniky, která umožňovala numericky řešit předtím těžko zvládnutelné úlohy. Nová teorie se rozvíjí a aplikuje například v mechanice kontinua, zejména v souvislosti s fyzikou atmosféry, kde ji zpopularizovaly takové pojmy jako Lorentzův atraktor nebo tzv. motýlí efekt, pozadu ale nezůstala ani kvantová mechanika, stejně jako další teorie, která zásadně změnila náš pohled na svět obecná teorie relativity. Objevením nové teorie gravitace obecné teorie relativity překonal Einstein dosavadní newtonovský koncept okamžitého působení síly na dálku a nahradil ho elegantním přístupem založeným na diferenciální geometrii. Prostor a čas byly propojeny již ve speciální teorii relativity, teprve v obecné relativitě se však z tohoto pasivního jeviště stal aktivní účastník děje. Einsteinovy rovnice říkají, jak se má prostoročas zakřivit při daném rozložení hmoty, stejně tak ale udávají, jak toto zakřivení, kterému říkáme gravitace, ovlivňuje pohyb hmoty. Jedná se tedy o dynamickou teorii gravitačního pole podobnou Maxwellově teorii elektromagnetického pole, ve které se veškeré změny šíří konečnou rychlostí. Jelikož se chaotické chování běžně vyskytuje už v newtonovském popisu, lze očekávat, že bude přítomno i v obecné relativitě. Existuje ale nějaká přímá souvislost mezi chaotickým pohybem testovacích částic v daném prostoročasu a jeho křivostí? Lze formulovat nějaké geometrické podmínky ať už nutné nebo postačující pro vznik chaosu? V této práci se zaměřím na geometrické kritérium založené na rovnici geodetické deviace a budu jej aplikovat na soustavu černá díra + disk / prstenec. 7
8 Předpovědi geometrické metody pak porovnám s výsledky získanými numerickou integrací rovnic geodetiky a znázorněnými na Poincarého řezech. V celé práci používám standardní značení a složkový formalismus obecné teorie relativity včetně geometrizovaných jednotek. Signatura metriky je ( + + +). Riemannův tenzor je v této práci definován: μ V ν;κλ V ν;λκ = R νκλv μ, Ricciho tenzor je pak: μ R νλ = R νμλ. 8
9 1. Základní pojmy teorie chaosu V této kapitole nejprve nastíním základní pojmy teorie chaosu, které využiji při následné aplikaci geometrického kritéria a poté zmíním pár specifik obecné teorie relativity. 1.1 Chaos v klasické mechanice V klasické (nekvantové) mechanice je stav zkoumaného systému s n stupni volnosti plně popsán bodem ve fázovém prostoru, to jest udáním hodnot všech zobecněných souřadnic q i a k nim sdružených hybností p i : (q 1,, q n, p 1,, p n ). Dynamika systému je pak dána Hamiltonovou funkcí na fázovém prostoru H(q i, p i ) a časový vývoj stavu trajektorie (q i (t), p i (t)) je určen Hamiltonovými rovnicemi dq i dt = H p i a dp i dt = H q i, (1.1) které se řeší spolu se zadanými počátečními podmínkami. Systém nazveme chaotickým, pokud pro dvě blízké počáteční podmínky dochází k exponenciálnímu rozbíhání obou trajektorii; takový systém je tzv. citlivý na počáteční podmínky, což značně snižuje schopnost předvídat jeho vývoj, ačkoliv se řídí deterministickými pohybovými rovnicemi. Jednou z metod jak určit, zda je systém chaotický, jsou takzvané Lyapunovovy exponenty, pomocí kterých lze kvantifikovat sbíhání/rozbíhání trajektorií. Mějme dvě blízké trajektorie spojené vektorem δ(t), potom je tzv. maximální Lyapunovův exponent λ definován jako limita (jak je uvedeno v [10]): λ = lim lim 1 t δ(0) 0 t ln δ(t) δ(0). (1.2) Lyapunovovy exponenty ve skutečnosti tvoří spektrum, jejich počet je roven počtu stupňů volnosti. Aby byl systém chaotický, musí být alespoň jeden z nich kladný. 9
10 Disipativní systémy (které nezachovávají objem ve fázovém prostoru) jsou charakterizovány zápornými Lyapunovovými exponenty, zatímco v případě konzervativních systémů je součet exponentů nulový (podrobnosti jsou uvedeny v [11]). Dalším charakteristickým rysem chaotických trajektorií je fakt, že jejich atraktor (podmnožina fázového prostoru, ke které trajektorie pro velké časy směřuje) není jednoduchou množinou, jako jsou bod, uzavřená křivka či plocha, ale je to fraktál, tzv. podivný atraktor, což se projevuje mimo jiné i na Poincarého řezech, o kterých se zmíním později. Významnou skupinou systémů, které nevykazují rysy chaotického chování, jsou tzv. integrabilní systémy. 1.2 Integrabilní systémy Při popisu pohybu hrají důležitou roli funkce na fázovém prostoru f j (q i, p i ), které se podél dané trajektorie (q i (t), p i (t)) s časem nemění, tedy f j (q i (t), p i (t)) = konst. (1.3) Takovéto funkce nazýváme integrály pohybu. Integrály pohybu jsou často důsledkem invariance pohybových rovnic vůči nějaké operaci symetrie (viz teorém Noetherové); příkladem takovýchto zachovávajících se veličin mohou být energie, hybnost nebo moment hybnosti. Pokud pro daný systém o n stupních volnosti existuje n nezávislých integrálů pohybu, nazveme jej integrabilním. Integrály se nazývají nezávislými, pokud {f i, f j } = 0 i, j = 1, n, (1.4) neboli pokud jejich Poissonova závorka vymizí. Jak je patrné z (1.3), existence integrálu pohybu omezuje pohyb ve fázovém prostoru na nadplochu dimenze 2n 1. V případě integrabilního systému, který je vázaný (např. potenciálová jáma), jsou však trajektorie omezeny na varietu dimenze 10
11 n s topologií toru. Pomocí kanonické transformace pak lze přejít k novým zobecněným souřadnicím a hybnostem (q i, p i ) (θ i, J i ), (1.5) v nichž hamiltonián závisí pouze na hybnostech. Těmto novým hybnostem J i říkáme akce (díky způsobu výpočtu, viz [13]) a k nim sdružené souřadnice nazýváme úhly. Jestliže hamiltonián závisí pouze na akcích, tedy H(θ i, J i ) = H(J i ), z Hamiltonových rovnic plyne θ i (t) = ω i t + β i a J i = konst. (1.6) Akce se tedy podél dané trajektorie zachovávají a určují ve fázovém prostoru invariantní torus, na který je pohyb vázán (obrázek 1.1). Torus je parametrizován úhly θ i, které jsou periodickými proměnnými, a to s periodami danými frekvencemi ω i. Obrázek 1.1: Schématické znázornění invariantního toru (převzato z [12]). Závislost původních zobecněných souřadnic q i na úhlech θ i se pak dá vyjádřit pomocí Fourierovy řady, pohyb v konfiguračním prostoru je tedy periodický. Aby byl pohyb periodický i ve fázovém prostoru (jako v případě harmonického oscilátoru), musí být podíly všech frekvencí rovny racionálním číslům; pokud tomu tak není, nazveme danou trajektorii kvaziperiodickou. Oba typy trajektorií vázaných na invariantní torus, tedy jak periodické, tak kvaziperiodické, považujeme za regulární, jejich Lyapunovovy exponenty jsou buď záporné, nebo nulové (viz [11]). 11
12 Jelikož jsou integrabilní systémy pro svou vysokou míru symetrie v přírodě vzácností, vzniká otázka, co se stane se strukturou invariantního toru při drobné poruše. Pokud je porucha dostatečně malá a hladká, pak se většina torů, byť v pozměněné formě, zachová. Výjimku pak tvoří tory odpovídající periodickému pohybu, který při perturbaci vymizí (podrobněji o tomto pojednává tzv. KAM 1 teorém). 1.3 Metoda Poincarého řezů Trajektorie ve fázovém prostoru (q i (t), p i (t)) získané řešením pohybových rovnic (1.1) lze snadno znázornit, máme-li systém s jedním stupněm volnosti (dvourozměrný fázový prostor), jak ale přistupovat k problému o více stupních volnosti? Situaci si lze ulehčit pomocí integrálů pohybu. Pokud máme systém o n stupních volnosti a najdeme-li m integrálů pohybu, které jsou navíc akcemi, můžeme se zabývat pohybem na efektivním fázovém prostoru o dimenzi 2(n m), do kterého už nezahrnujeme akce a k nim sdružené cyklické souřadnice. Podaří-li se omezit fázový prostor na dvě souřadnice a dvě hybnosti a existuje-li navíc další integrál pohybu, který však není akcí (typicky se jedná o celkovou energii systému), dospějeme k fázovému prostoru o třech nezávislých proměnných, a právě na takovýto prostor je vhodné aplikovat techniku Poincarého řezu. Poincarého řez vytvoříme tak, že ve fázovém prostoru zvolíme plochu 2 P(q i, p i ) = 0 (často je výhodné volit plochu, na níž je některá ze souřadnic konstantní) a budeme zaznamenávat průchody dané trajektorie touto plochou (jak je ukázáno na obrázku 1.2). Plochu řezu přirozeně volíme tak, aby jí trajektorie opakovaně procházely. 1 Zkratka značící jména objevitelů: A. Kolmogorov, V. Arnold a J. Moser. 2 Obecně je Poincarého řez definován pro prostor libovolné dimenze, po provedení řezu pomocí nadplochy pak dostaneme řez s dimenzí o jednu menší než je dimenze původního prostoru. 12
![Obrázek 1.2: Konstrukce Poincarého řezu (převzato z [15]). Pro různé typy trajektorií se Poincarého řezy značně liší. V případě periodických trajektorií je zřejmé, že se jedná o konečný počet bodů.](/docs-images/94/121380383/images/13-1.jpg "Pro kvaziperiodické trajektorie ležící na ploše s topologií toru jsou výsledkem průniku s rovinou řezu uzavřené křivky (obrázek 1.3).")
13 Obrázek 1.2: Konstrukce Poincarého řezu (převzato z [15]). Pro různé typy trajektorií se Poincarého řezy značně liší. V případě periodických trajektorií je zřejmé, že se jedná o konečný počet bodů. Pro kvaziperiodické trajektorie ležící na ploše s topologií toru jsou výsledkem průniku s rovinou řezu uzavřené křivky (obrázek 1.3). V případě chaotické trajektorie, která není vázána na žádnou plochu, a která hustě vyplňuje určité oblasti fázového prostoru, dostáváme v řezu celé plochy vyplněné body průniku, sledujeme-li trajektorii po dostatečně dlouhý čas, jak je znázorněno na obrázku 1.4. Obrázek 1.3: Průnik invariantního toru a roviny Poincarého řezu (převzato z [14]). 13
14 Obrázek 1.4: Příklad Poincarého řezu s chaotickými (hustě vyplněnými) oblastmi (převzato z [3]). 1.4 Pohyb v obecné teorii relativity Obecná teorie relativity popisuje gravitaci jako zakřivení čtyřrozměrného prostoročasu. Geometrii prostoročasu pak plně popisuje metrický tenzor g μν, který je řešením Einsteinových rovnic gravitačního pole. V obecné relativitě se volné částice pohybují v prostoročase po křivkách, kterým říkáme geodetiky. Geodetiky zobecňují pojem přímky, vzdálenost mezi dvěma body po nich je extremální. Částice s nenulovou klidovou hmotností se pohybují po tzv. časupodobných geodetikách, ty jsou přirozeně parametrizovány vlastním časem τ. Geodetiky x μ (τ) jsou řešením rovnice geodetiky d 2 x μ dτ 2 + Γ μ νσ dx ν dx σ dτ dτ = 0. (1.7) Písmenem Γ jsou značeny Christoffelovy symboly, jež jsou plně určeny metrickým tenzorem. Máme tedy soustavu čtyř obyčejných diferenciálních rovnic druhého řádu a můžeme tedy zavést fázový prostor všech poloh a čtyřhybností (x μ, p μ ) resp. prostor všech poloh a čtyřrychlostí (x μ, u μ ), kde čtyřrychlost je u μ = dxμ čtyřhybnost p μ = mu μ (m je hmotnost částice). dτ a 14
15 I v obecné relativitě se setkáváme s integrály pohybu, jejichž existence je zde důsledkem symetrií metrického tenzoru. Symetrie je generována Killingovým vektorovým polem, v jehož směru je Lieova derivace metriky rovna nule. Ke každému Killingovu vektoru K ν přísluší průmět čtyřrychlosti, který se podél geodetiky zachovává (viz [16]): g μν u μ K ν = konst. (1.8) Kromě zachovávajících se průmětů je čtyřrychlost omezena ještě normalizací g μν u μ u ν = 1, (1.9) která platí podél jakékoliv světočáry. 15
16 2. Weylovy prostoročasy Weylovy prostoročasy jsou jednou ze tříd přesných řešení Einsteinových rovnic gravitačního pole. Jedná se o statické (Lze najít souřadnice, ve kterých metrika nezávisí na souřadnicovém čase a koeficienty g 0i jsou nulové.) a axiálně symetrické prostoročasy. V této práci se navíc omezím na vakuové Weylovy prostoročasy, ty lze, jak je uvedeno např. v [17], popsat Weylovou metrikou: ds 2 = e 2ν(ρ,z) dt 2 + e 2λ(ρ,z) 2ν(ρ,z) (dρ 2 + dz 2 ) + ρ 2 e 2ν(ρ,z) dφ 2. (2.1) Weylovy souřadnice jsou cylindrického typu, ρ je souřadnicová vzdálenost od osy a φε(0,2π). Vzhledem k omezením daným zmíněnými symetriemi je prostoročas plně určen dvěma metrickými funkcemi ν a λ, které závisejí na ρ a z. Dosadíme-li (2.1) do Einsteinových rovnic a omezíme-li se pouze na vakuové prostoročasy, dostaneme podle [17] vztahy pro obě metrické funkce: ν,ρρ + 1 ν ρ,ρ + ν,zz = 0, (2.2) λ = ρ,z osa ρ{[(ν,ρ ) 2 (ν,z ) 2 ]dρ + 2ν,ρ ν,z dz}. (2.3) Rovnice (2.2) je Laplaceova rovnice v cylindrických souřadnicích a její řešení závisí na příslušných okrajových podmínkách. Pro funkci ν tedy platí stejná rovnice jako pro newtonovský gravitační potenciál a i zde je důsledkem linearity rovnice princip superpozice řešení. Gradient druhé metrické funkce λ je dán derivacemi ν s podmínkou nulovosti λ na ose (ρ = 0), funkci λ pak lze vyjádřit pomocí křivkového integrálu (2.3). Metrický tenzor tedy získáme řešením Laplaceovy rovnice (2.2) pro všechny zdroje zvlášť. Ze součtu všech funkcí ν pak vypočteme λ a obě funkce pak dosadíme do (2.1). 16
17 Nyní uvedu konkrétní řešení, kterými se budu v této práci zabývat: 2.1 Schwarzschildovo řešení Schwarzschildovo řešení je historicky prvním (zakřiveným) řešením Einsteinových rovnic, jedná se o sféricky symetrický, statický, vakuový prostoročas, zcela určený jediným parametrem, a to hmotností černé díry M. Metrická funkce ν je ve Weylových souřadnicích dána předpisem ν = 1 ln 2 (d 1+d 2 2M ), (2.4) d 1 +d 2 +2M kde d 1,2 = ρ 2 + (z M) 2. Schwarzschildova metrika je nejčastěji uváděna ve Schwarzschildových souřadnicích (t, r, θ, φ), jež jsou s Weylovými svázány vztahy ρ = r(r 2M) sin θ, z = (r M) cos θ. V Schwarzschildových souřadnicích má metrika dvě singularity. První se nachází v bodě r = 0, ve kterém je koncentrována veškerá hmotnost černé díry. Jedná se o tzv. prostoročasovou singularitu, která je přítomna ve všech souřadnicích, o čemž mimo jiné svědčí divergence invariantů popisujících křivost v tomto bodě. Druhá singularita je naopak souřadnicová, leží v bodě r = 2M a odpovídá nadploše, které říkáme horizont událostí. Ten obklopuje vlastní černou díru, což je část prostoročasu pod horizontem (r < 2M). Weylovy souřadnice popisují pouze tu část prostoročasu nad horizontem, ten je zde částí osy: zε( M, M) Invertovaný disk Morgana a Morganové Jedná se o rodinu nekonečně tenkých disků vzniklou inverzí disků Morgana a Morganové (dále jen M-M disk), které řeší Laplaceovu rovnici (2.2) a mají hustotu ω (m) nenulovou pro ρε(0, b), kde b je poloměr disku. Disky vzniklé inverzí M-M disků mají naopak hustotu nenulovou pro ρ > b, přesto stále řeší Laplaceovu rovnici, která je vůči zmíněné transformaci invariantní (Kelvinova transformace, viz [18]), průběh hustoty disku o hmotnosti M je konkrétně ω (m) (ρ) = 22m (m!) 2 M b (2m)!π 2 ρ 3 (1 b2 ρ 2)m 1 2. (2.5) 17
18 Disky jsou číslovány přirozeným číslem m, z výrazu (2.5) je patrné, že pro vyšší m hustota rychleji klesá k nule v bodě ρ = b. Odpovídající metrická funkce ν, tedy řešení Laplaceovy rovnice s okrajovou podmínkou danou ekvatoriální plošnou hustotou (2.5), má tvar: ν (m) (x, y) = 22m+1 (m!) 2 M πb (m) kde koeficienty C 2n jsou dány (m) ( 1) C 2n = n (4n+1)(2n)!(m+n)!, (n!) 2 (m n)!(2m+2n+1)! m n=0 (m) C 2n iq2n ( i y x )P 2n ( ) x 2 +1 y 2 x 2 +1 y 2 x 2 +1 y 2, (2.6) P 2n jsou Legendreovy polynomy a Q 2n jsou Legendreovy funkce druhého druhu, které se dají vyjádřit pomocí Legendreových polynomů jako Q 2n (ix) = ip 2n (ix) arccot(x) 2n 1 j=1. j P j 1(iX)P 2n j (ix) Metrická funkce (2.6) je zde vyjádřena ve zploštělých sféroidálních souřadnicích (x, y), které souvisejí s Weylovými souřadnicemi (ρ, z) vztahy ρ 2 = b 2 (x 2 + 1)(1 y 2 ), z = bxy. 2.3 Bachův-Weylův prstenec Funkce ν zde přesně odpovídá newtonovskému gravitačnímu potenciálu, který se vypočte integrací přes jednorozměrný kruhový prstenec s hmotností M a poloměrem b, výsledek ν = 2MK(k) π (ρ+b) 2 +z 2, (2.7) je dán pomocí eliptického integrálu prvního druhu K(k) = π dφ k 2 (sin φ) 2, kde k = 4ρb (ρ+b) 2 +z 2. 18
19 2.4 Geodetiky ve Weylově prostoročase Řešíme-li rovnici geodetiky pro Weylovu metriku (2.1), dostaneme pro časovou a úhlovou kovariantní složku čtyřrychlosti du t =0, du φ dτ dτ =0. (2.8) Tento výsledek není překvapivý, neboť ve Weylově prostoročasu máme dva Killingovy vektory, a to ve směru souřadnicových čar t a φ, jejich skalární součin s čtyřrychlostí je pak roven právě kovariantním složkám čtyřrychlosti u t a u φ. Na význam obou integrálů pohybu lze nahlédnout z pohledu pozorovatele v nekonečnu. Jelikož výše zmíněná řešení Einsteinových rovnic popisují asymptoticky plochý prostoročas, můžeme použit Minkowského metriku k vyhodnocení obou konstant v nekonečnu: u t = γ, u φ = ρ 2 γ dφ dt, (2.9) kde γ je Lorentzův faktor daný rychlostí vůči stojícímu pozorovateli v nekonečnu. Jak je vidět z (2.10), složky: u t a u φ jsou až na konstanty úměrnosti rovny záporně vzaté energii E a momentu hybnosti L, a to opět vzhledem ke statickému pozorovateli v nekonečné vzdálenosti od zdrojů gravitačního pole. Geodetický pohyb je tedy charakterizován dvěma integrály pohybu, jejichž existence je stejně jako v klasické mechanice důsledkem symetrií, v našem případě statičnosti a axiální symetrie. 19
20 3. Geometrické kritérium Jak již bylo řečeno v předchozí části, zabýváme se v této práci geodetickým pohybem. Abychom mohli popsat sbíhání resp. rozbíhání dvou blízkých geodetik, zavedeme tzv. deviační vektor n μ, který obě blízké geodetiky spojuje. Pro tento vektor lze odvodit rovnici geodetické deviace D 2 n μ dτ 2 = R μ νσρu ν n σ u ρ. (3.1) Druhá absolutní derivace podle vlastního času stojící na levé straně rovnice má význam vzájemného zrychlení dvou částic pohybujících se po geodetikách, zatímco μ na pravé straně je Riemannův tenzor křivosti R νσρ, ten závisí pouze na metrickém tenzoru a jeho prvních a druhých derivacích podle souřadnic. Jelikož podle newtonovské limity rovnice geodetiky souvisí metrický tenzor s gravitačním potenciálem, pak analogicky Riemannův tenzor závislý na druhých derivacích metriky souvisí s nehomogenitou gravitačního pole, tedy se slapovými silami. Rovnici (3.1) můžeme, jak je uvedeno např. v [2], upravit na tvar D 2 n μ dτ 2 = (grad n) μ V u (n), (3.2) kde složky gradientu jsou (grad n ) μ = g μν n a potenciál V u (n) je dán vztahem ν (3.3) V u (n) = 1 2 R μνσρn μ u ν n σ u ρ = 1 2 K(u, n) n 2, (3.4) kde K(u, n) = R(u,n,u,n) n 2 u 2 u,n 2 je sekční křivost3 a prostorupodobný vektor n lze speciálně volit tak, aby platilo u, n = 0. 3 Zde máme sekční křivost definovanou s opačným znaménkem, než je běžné, jelikož u 2 = 1. 20
21 Potenciál (3.4) můžeme pro danou čtyřrychlost u přepsat do tvaru V u (n) = 1 A μ 2 σn μ n σ, (3.5) kde tenzor druhého řádu A σ μ je definován A σ μ = R μν σρ u ν u ρ. (3.6) V této formulaci se na problém přitahování resp. odpuzování geodetik, který je popsán rovnicí (3.2), můžeme dívat jako na pohyb částice v potenciálovém poli. Potenciál V u (n) má pouze jediný stacionární bod n μ = 0, ve kterém nabývá nulové hodnoty. Pokud by byl potenciál jakožto funkce n v dané oblasti prostoročasu nezáporný, dostali bychom potenciálovou jámu s minimem v bodě n μ = 0, do tohoto bodu by pak byla ona fiktivní částice přitahována a geodetiky by se k sobě přibližovaly. Opačná situace nastane, pokud se budou částice nacházet v oblasti V u (n) 0: v takovém případě vznikne potenciálový kopec s maximem n μ = 0 a geodetiky se budou odpuzovat, přesněji řečeno bude docházet k exponenciálnímu vzdalování obou částic pohybujících se po geodetikách, jak plyne z rovnice (3.2). Než přistoupíme k analýze znaménka potenciálu, je třeba zdůraznit, že situace není zdaleka tak jednoduchá, jak je vylíčeno v předchozích dvou odstavcích. Při pohybu v prostoročase se mění spád jámy/kopce, jelikož potenciál závisí na poloze a čtyřrychlosti, důležitější však je, že v našem případě vlastně žádná jáma ani kopec nefigurují, což je důsledkem toho, že tenzor A μ σ není pozitivně definitní ani negativně definitní, o čemž se lze snadno přesvědčit výpočtem jeho stopy A μ μ : A μ μ = R μν μρ u ν u ρ = R ρ ν u ν u ρ = 0, (3.7) ν kde R ρ je Ricciho tenzor (ten je ve vakuových prostoročasech, kterými se zde zabýváme, nulový). Jelikož je tenzor A μ σ indefinitní, není v bodě n μ = 0 extrém, ale pouze sedlový bod, z čehož plyne, že přitažlivost působí pouze v některých směrech deviačního vektoru, zatímco pro zbylé směry n μ dochází k odpuzování. To, která ze dvou tendencí převažuje, lze zjistit výpočtem vlastních čísel A μ σ. 21
22 Tenzor A μ σ lze reprezentovat jako matici 4 4, která má čtyři vlastní čísla, jejichž součet je nula (plyne z nulovosti stopy). Jedno z vlastních čísel je vždy nulové, odpovídá vektorům úměrným čtyřrychlosti: A σ μ k u σ = k R μν σρ u ν u ρ u σ = 0. (3.8) Nulový výsledek je důsledkem antisymetrie Riemannova tenzoru. Zmíněné nulové vlastní číslo dále nebudeme uvažovat, jelikož n μ nepatří do jeho vlastního podprostoru, protože jsme deviační vektor volili tak, aby platilo n μ u μ = 0. Zbývají tedy tři vlastní čísla, jejichž součet je nula. Zajímavým faktem je, jak ukážeme později, že tato vlastní čísla vůbec nezávisí na čtyřrychlosti u μ. K výpočtu vlastních čísel užijeme postupu popsaném v [1]. Nejprve zavedeme (jak je uvedeno v [2]) bivektor S pomocí vnějšího součinu čtyřrychosti u a deviačního vektoru n, S = u n. (3.9) Takovýto bivektor má šest složek a odpovídá tenzoru druhého řádu S μν vzniklého antisymetrizací, S μν = 1 2 (uμ n ν n μ u ν ). (3.10) Na prostoru bivektorů je definována metrika G předpisem G(A B, C D) = g(a, C)g(B, D) g(a, D)g(B, C). (3.11) Od Riemannova tenzoru tak můžeme přejít k odpovídající bilineární formě R AB na prostoru bivektorů tak, aby platilo R(u, n, u, n) = R μνσρ u μ n ν u σ n ρ = R μνσρ S μν S σρ = R AB S A S B, (3.12) kde A, B = 1,,6. Vztah (3.12) plyne z antisymetrie Riemannova tenzoru. Nyní budeme hledat vlastní čísla κ této bilineární formy, R A B S B = κs A. (3.13) Zde je výhodné řešit vlastní úlohu (3.13) pro Weylův tenzor, ten stejně jako Riemannův tenzor souvisí se slapovými silami, ve vakuu však oba tyto tenzory splývají. 22
23 Spočteme-li komponenty Weylova tenzoru pro obecný tvar Weylovy metriky (2.1), dostaneme bilineární formu na prostoru bivektorů C B A 4, tu můžeme reprezentovat jako matici 6 6, která má velice jednoduchý, blokově diagonální tvar C = ( ε 0 ), (3.14) 0 ε kde symetrická matice ε vypadá 5 1 C 1 1 C ε = ( C 1 2 C 2 0 ). (3.15) C 3 Z pohledu na výše uvedenou matici je patrné, že mnoho složek Weylova tenzoru je rovno nule, proto je v tomto obecném tvaru výhodnější počítat s Weylovým než s Riemannovým tenzorem. Z (3.15) snadno vypočteme všechna tři vlastní čísla, κ 1 = 1 2 (C C (C 1 1 C 2 2 ) 2 + 4(C 2 1 ) 2 ), κ 2 = 1 2 (C C 2 2 (C 1 1 C 2 2 ) 2 + 4(C 2 1 ) 2 ), (3.16) κ 3 = C 3 3. Jak již bylo uvedeno výše, protože jsme ve vakuu, platí κ 1 + κ 2 + κ 3 = 0. (3.17) Nyní se krátce vrátíme k problému vlastních čísel tenzoru A σ μ. Předpokládejme, že jsme našli vlastní bivektor z rovnice (3.13), potom pro příslušný antisymetrický tenzor platí R μν σρ S σρ = 2κS μν. (3.18) Určíme-li ze znalosti čtyřrychlosti a S μν deviační vektor n μ, zjistíme, že se jedná o vlastní vektor A σ μ : A σ μ n σ = R μν σρ u ν u ρ n σ = R μν σρ 23 u ν S σρ = 2κu ν S μν = κn μ. (3.19) 4 Tato bilineární forma je zavedena stejným způsobem jako R AB, zvedání indexu je provedeno pomocí metriky (3.11). 5 Indexy 1,2,3 odpovídají dvojicím tρ, tz a tφ.
24 Vlastní čísla A σ μ tedy nezáleží na čtyřrychlosti a jsou až na znaménko shodná s vlastními čísly vypočtenými v (3.16). Z potenciálu daného rovnicí (3.5) a kladné normy n μ plyne, že tendence k rozbíhání geodetik je větší pro κ i > 0. Jelikož je součet vlastních čísel rovný nule, bude odpuzování převažovat v oblastech prostoročasu se dvěma kladnými vlastními čísly: (+ + ) nebo (+ +). 6 Základní ideou tohoto geometrického kritéria tedy je nalézt rozbíhavé oblasti, odpovídající dvěma kladným vlastním číslům tenzoru A σ μ a na základě jejich velikosti vzhledem k povoleným oblastem pohybu (viz další kapitolu) odhadnout, zda by měl systém pro dané parametry vykazovat chaotické chování. Na závěr několik poznámek k této metodě. Z rovnice geodetické deviace (3.1) lze pro druhou derivaci velikosti vektoru n μ odvodit rovnici d 2 dτ 2 n 2 = 2R μνσρ n μ u ν n σ u ρ Dn + g μ Dn υ μν. (3.20) dτ dτ Z podobné rovnice vychází Y. Sota a další ve svém článku [1]. První člen na pravé straně této rovnice je úměrný sekční křivosti stejně jako potenciál V u (n), chování tohoto členu tedy lze popsat pomocí již vypočtených vlastních čísel κ i. Problém s rovnicí (3.20) však je určit, jak velký vliv má druhý člen, který má význam kvadrátu velikosti vzájemné rychlosti. Tento člen je vždy kladný a měl by tedy přispívat k rozbíhání geodetik. Je ale jeho velikost srovnatelná s prvním členem? Jak velkou roli hraje? Na tuto otázku nejsem schopen odpovědět, proto jsem v této práci užil intuitivnějšího popisu založeného na pohybu částice v potenciálovém poli. Přístup založený na rovnici geodetické deviace nebyl v literatuře využit jen v obecné relativitě, ale častěji spíše v klasické mechanice (např. v [5]) při studiu pohybu v konzervativním poli, kde se místo relativistické metriky zavedla metrika E g ij = δ E V(x) ij, (3.21) ve které E značí energii a V(x) potenciál konzervativní síly. 6 Oblast ( + +) nemůže existovat, neboť κ 1 > κ 2. 24
25 Na začátku této kapitoly jsem uváděl vztah mezi naším potenciálem a geometrickým pojmem sekční křivosti K(u, n). Toto geometrické kritérium se nazývá geometrickým právě proto, že si dává za cíl najít souvislost mezi chaotickým pohybem a lokální geometrií prostoročasu, která by podle této metody měla nutit geodetiky k vzájemnému sbíhání či rozbíhání. Jako jistý speciální případ našeho problému mohou posloužit geodetiky na Riemannově varietě s konstantní sekční křivostí, kde se geodetiky sbíhají pro K > 0 (eliptická geometrie) a rozbíhají pro K < 0 (hyperbolická geometrie). 25
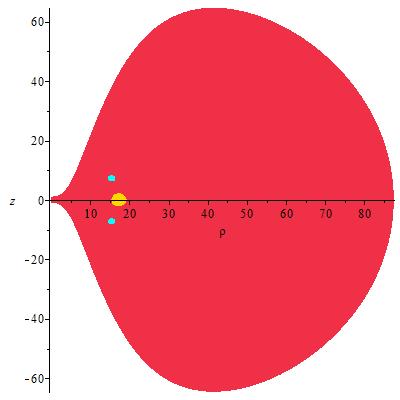
26 4. Výsledky geometrické metody 4.1 Efektivní potenciál V této části srovnám výsledky geometrického kritéria, které jsem aplikoval na prostoročasy popsané ve druhé kapitole, s numerickými výsledky v podobě Poincarého řezů převzatými z článku [3]. Vzhledem k existenci dvou integrálů pohybu a normalizaci čtyřrychlosti se budeme zabývat pouze třírozměrným fázovým prostorem, ve Schwarzschildových souřadnicích (r, θ, u r ). V tomto třírozměrném prostoru lze přirozeně vést Poincarého řez ekvatoriální rovinou (θ = π ), tedy 2 rovinou, v níž černou díru obklopuje disk nebo prstenec. Převzaté obrázky Poincarého řezů budu porovnávat s obrázky, které by podle uvažovaného geometrického kritéria měly být chaotické (tedy s tendencí rozbíhání geodetik), tyto obrázky jsou znázorněny ve Weylových souřadnicích (ρ, z). Jelikož se částice nemohou v prostoročase pohybovat libovolně, je vhodné vykreslit povolené oblasti pohybu a zjistit, zda se s nimi oblasti vymezené geometrickým kritériem pronikají a jak velkou část povolené oblasti zabírají oblasti s tendencí rozbíhání geodetik. Povolené oblasti najdeme pomocí efektivního potenciálu. Z normalizace čtyřrychlosti (v kovariantní formě) plyne g ρρ (u ρ ) 2 + g zz (u z ) 2 = e 2ν(ρ,z) (E 2 V 2 ef ) > 0. (4.1) Protože jsou g ρρ a g zz kladné, je celý výraz na levé straně kladný, proto se může částice s danou energií E pohybovat jen v oblasti E 2 V 2 ef > 0, kde bezrozměrný efektivní potenciál V ef je V ef 2 (ρ, z) = e 2ν(ρ,z) (1 + L 2 ρ 2 e 2ν(ρ,z)). (4.2) V předchozích dvou výrazech jsem označil E = u t, L = u φ konstanty geodetického pohybu (energie a azimutální moment hybnosti vůči nekonečnu). 26
")


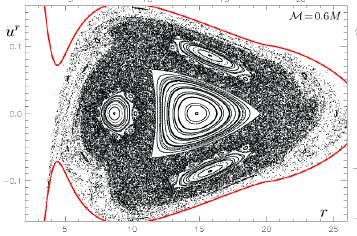
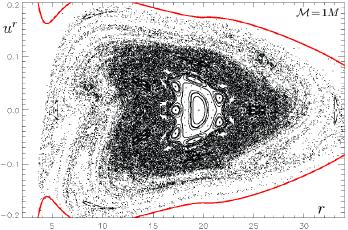
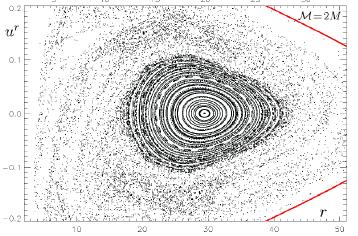
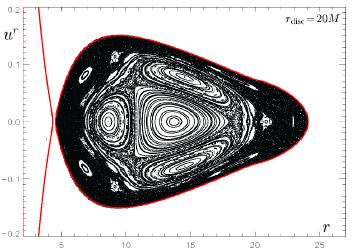
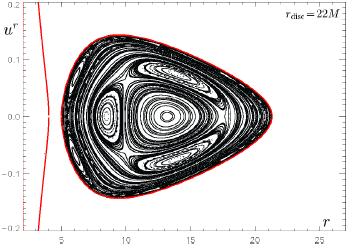
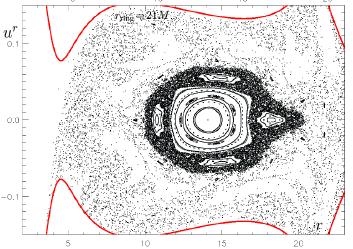
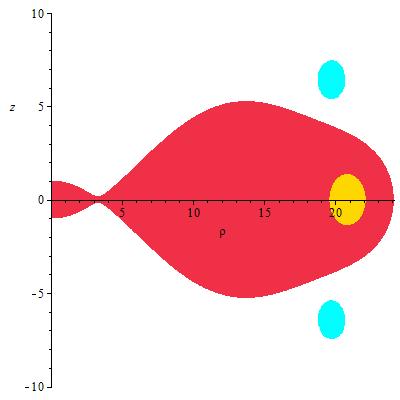
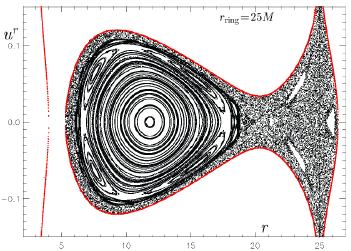
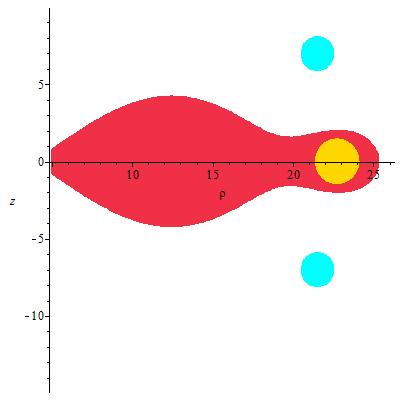
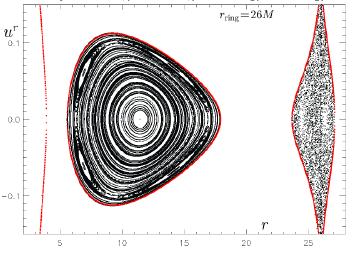
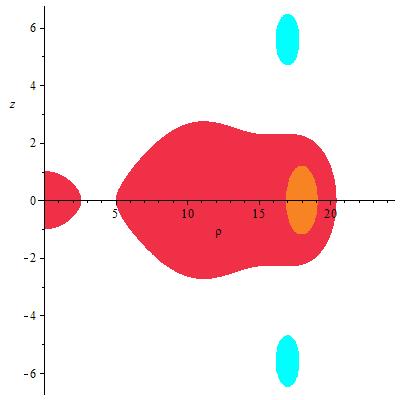
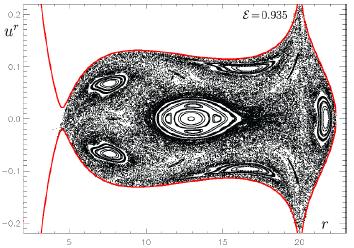
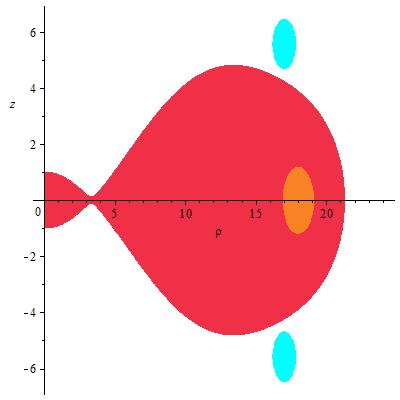
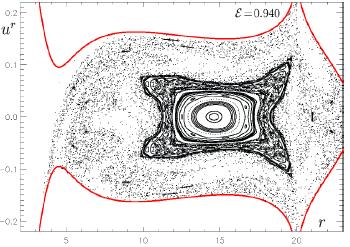
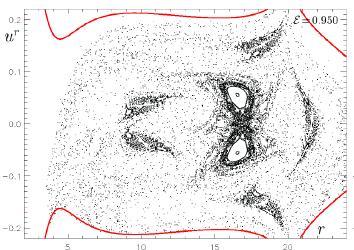
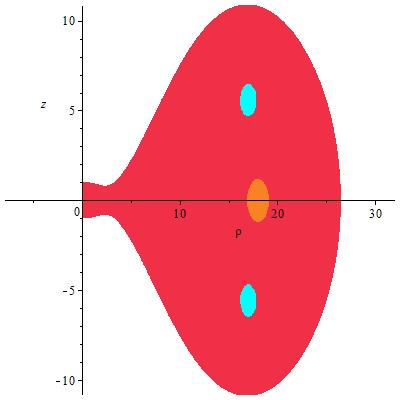
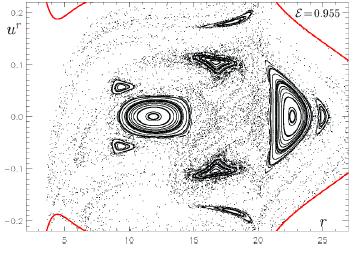
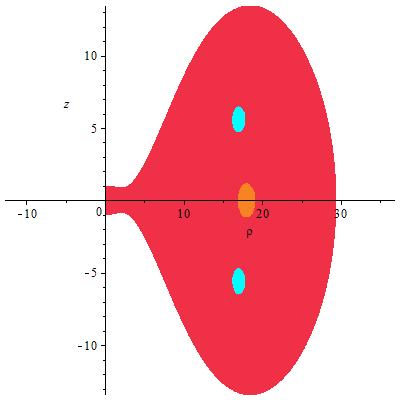
27 Nyní již můžeme přistoupit k vlastnímu srovnání výstupů geometrického kritéria a Poincarého řezů. Ve všech obrázcích je povolená oblast značena červenou barvou, první rozbíhavá oblast s vlastními hodnotami (+ + ) světle modrou a druhá rozbáhavá oblast (+ +) žlutou (někde oranžovou), v Poincarého řezech je hranice povolené oblasti značena červeně. 4.2 První invertovaný disk Morgana a Morganové Obrázek 4.1: Série Poincarého řezů pro geodetiky v poli černé díry a 1. invertovaného M-M disku sledující závislost na relativní hmotnosti disku. Vpravo je vždy korespondující obrázek rozbíhavých oblastí. Disk má poloměr r = 20M, částice mají energii E = 0,955 a moment hybnosti L = 3,75M. 27

28 Obrázek 4.1: pokračování 28

29 Obrázek 4.1:pokračování 29
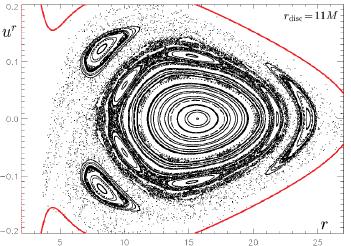
30 V první sérii obrázků vidíme postupný nárůst chaotického chování a poté spíše návrat k regulárnímu pohybu. V prvních dvou Poincarého řezech se nacházejí pouze uzavřené křivky, ve shodě s tím není na obrázkách vpravo přítomna žádná rozbíhavá oblast. Situace se mění až pro M = 0,46M, kde se na okrajích Poincarého řezu vynořují chaotická moře, v odpovídající mapě rozbíhavých oblastí skutečně již došlo k průniku povolené oblasti s oblastí (+ + ). Zmíněná rozbíhavá oblast je pak plně pohlcena povolenou oblastí a dělí se na dvě menší, tomu odpovídá vymizení regulárních trajektorií, jak plyne z Poincarého řezů pro M = 0,9M, M = 1M a M = 1,1M. V těchto třech případech je také podíl velikostí oblasti (+ + ) v rámci povolené oblasti největší. Jiná situace už je ale na posledním obrázku, kde se uprostřed opět formují uzavřené křivky indikující regulární geodetický pohyb, s tím koresponduje i poslední obrázek v pravém sloupci, v němž se relativní velikost rozbíhavých oblastí zpátky zmenšila. Obrázek 4.2: Série map rozbíhavých" oblastí a Poincarého řezů pro Schwarzschildovu černou díru a invertovaný 1. M-M disk o hmotnosti M = 0,5M. Energie geodetického pohybu je E = 0,955 a moment hybnosti má hodnotu L = 3,75M. Obrázky sledují závislost na vnitřním poloměru disku 30

31 Obrázek 4.2: pokračování 31

32 Obrázek 4.2: pokračování 32

33 Obrázek 4.2: pokračování 33
34 Druhá série obrázků 4.2, ilustrující závislost na poloze disku, má podobný charakter jako série předchozí, až na to, že se zde obrázky rozbíhavé oblasti vyvíjejí obráceně. Na začátku je přítomna malá rozbíhavá oblast, která postupně roste (největší je pro r = 19,4Ma r = 20M); to se skutečně odráží i na Poincarého řezech, kde větší části jsou vyplněny nepravidelnými průchody trajektorií rovinou řezu ( začerněné oblasti ). Změna nastává opět v posledním obrázku, kde opět dominují uzavřené křivky a rozbíhavá oblast opouští povolenou oblast. Obrázek 4.3: Poincarého řezy a obrázky rozbíhavých oblastí pro černou díru a invertovaný 1. M-M disk o hmotnosti M = 0,5Ma poloměru r = 20M. Geodetický pohyb je charakterizován momentem hybnosti L = 3,75M, série zachycuje závislost na energii E. 34
35 Obrázek 4.3: pokračování 35
, tedy ještě před proniknutím (+ + ) do povolené oblasti. 4.")
36 Obrázek 4.3: pokračování V sérii obrázků 4.3, která ilustruje závislost na energii geodetik, se nemění oblast (+ + ), ale pouze povolená oblast, která závisí na energii. Je zajímavé si povšimnout, že zárodky chaotického chování existují už ve druhém obrázku (E = 0,953), tedy ještě před proniknutím (+ + ) do povolené oblasti. 4.3 Čtvrtý invertovaný disk Morgana a Morganové Obrázek 4.4: Schwarzschildova černá díra obklopená 4. invertovaným diskem Morgana a Morganové. Disk má poloměr r = 20M, částice se pohybují s energií E = 0,968 a momentem hybnosti L = 3,75M. Sekvence obrázků znázorňuje vývoj Poincarého řezů a rozbíhavých oblastí s rostoucí relativní hmotností disku. 36
37 Obrázek 4.4: pokračování 37



38 Obrázek 4.4: pokračování Obrázek 4.5: Poincarého řezy pro Schwarzschildovu černou díru a 4. invertovaný disk Morgana a Morganové. Disk má hmotnost M = 0,5M, geodetický pohyb je charakterizován energií E = 0,964 a momentem hybnosti L = 3,75M. Jelikož se zde 38
 je patrné, že geometrické kritérium přestává fungovat.")
39 podle geometrického kritéria nevyskytovaly žádné rozbíhavé oblasti, uvádím zde pouze Poincarého řezy. Obrázek 4.5: pokračování Z obou sérií obrázků pro 4. invertovaný M-M disk (obr. 4.4 a 4.5) je patrné, že geometrické kritérium přestává fungovat. Pokud by kritérium fungovalo stejně citlivě jako v případě prvního disku, začaly by se v sekvenci obrázků s měnící se hmotností objevovat rozbíhavé oblasti už od M = 0,6M. Velký nesoulad je pak vidět u obrázků M = 0,9M a M = 1,2M, kde se sice rozbíhavá oblast vyskytuje, ale je velmi malá ve srovnání se situací u 1. M-M disku a neodpovídá stupni chaotičnosti Poincarého diagramu. Ve druhé sérii (obrázek 4.5) se žádná rozbíhavá oblast nevyskytovala, na druhou stranu je pravdou, že regulární křivky vyplňují velké části těchto Poincarého řezů. Celkově se dá říci, že v případě 4. invertovaného M-M disku došlo k velké ztrátě citlivosti geometrické metody oproti 1. disku. Obecně se zde rozbíhavé oblasti objevovaly pro vyšší hmotnosti disku. 39
40 4.4 Bachův-Weylův prstenec Obrázek 4.6: Poincarého řezy a odpovídající obrázky rozbíhavých oblastí pro Schwarzschildovu černou díru a Bachův-Weylův prstenec s poloměrem r = 20M, částice se pohybují s energií E = 0,977 a momentem hybnosti L = 3,75M. Série zachycuje závislost na hmotnosti prstence. 40
41 Obrázek 4.6: pokračování 41
42 Obrázek 4.6: pokračování 42

43 Obrázek 4.6: pokračování 43
44 Hmotnostní série obrázků pro Bachův-Weylův prstenec se výrazně odlišuje od ostatních sérii a je především obtížné ji interpretovat. Obrázky jsou vyplněny uzavřenými křivkami, jež by měly indikovat regularitu, avšak tyto regulární oblasti jsou velmi malé a prolínají se s chaotickými oblastmi. Vzhledem k výše zmíněnému se domnívám, že porovnávat s mapami rozbíhavých oblastí má smysl až v případě posledních tří obrázků, kde jsou výsledky srovnatelné s prvním diskem a lepší než u čtvrtého disku. Obrázek 4.7: Poincarého řezy a obrázky rozbíhavé oblastí pro Schwarzschildovu černou díru a Bachův-Weylův prstenec mapující závislost na poloměru prstence. Prstenec má hmotnost M = 0,5M, energie pohybu je E = 0,94 a moment hybnosti má hodnotu L = 3,75M. 44

45 Obrázek 4.7: pokračování 45


46 Obrázek 4.7: pokračování 46


, která prochází ekvatoriální rovinou.")
47 Obrázek 4.7: pokračování Série obrázků 4.7 ilustruje závislost geodetické dynamiky na poloměru Bachova- Weylova prstence. První tři Poincarého řezy této série obsahují poměrně málo bodů, jelikož mnoho geodetik rychle skončí v černé díře, proto je těžké je srovnávat s obrázky napravo. Další obrázky pak mají chaotický charakter, s čímž souhlasí i přítomnost rozbíhavých oblastí. Zajímavé je sledovat radiální polohu oblasti (+ +), která prochází ekvatoriální rovinou. Zatímco v Poincarého řezu r = 19M je překvapivě oblast nejvíce regulární ve stejné poloze jako žlutě značená rozbíhavá oblast, v dalších obrázcích, ve kterých už nehrají žádnou roli oblasti (+ + ), odpovídá přítomnost 47




48 oblasti (+ +) na daném poloměru chaos, což ještě vynikne po rozdělení povolené oblasti. Velký rozdíl je mezi posledními dvěma Poincarého řezy, zatímco v obou mapách rozbíhavých oblastí zabírá (+ +) většinu povolené oblasti. To by se mohlo dát vysvětlit tím, že 3. vlastní číslo spojitě klesá k nule na hranici žluté oblasti, a tedy na posledním obrázku nabývá v průniku s povolenou oblastí nízkých hodnot. Ještě viditelněji nastává tato situace v prvních dvou obrázcích následující série. Obrázek 4.8: Poincarého řezy a obrázky rozbíhavých oblastí pro Schwarzschildovu černou díru a Bachův-Weylův prstenec o hmotnosti M = 0,5M a poloměru r = 20M. Geodetický pohyb je charakterizován momentem hybnosti L = 3,75M, série zachycuje závislost na jeho energii. 48

49 Obrázek 4.8: Obrázek pokračování 49

50 Obrázek 4.8: pokračování 50
 sérii předchozí.")

51 Obrázek 4.8: pokračování Tato poslední série obrázků 4.8, ilustrující závislost geodetické dynamiky na energii pro Bachův-Weylův prstenec, v podstatě kopíruje (i když v opačném pořadí) sérii předchozí. I zde se vyskytují řezy s malým počtem bodů, celkově však dochází v posledních obrázcích k nárůstu regulárního chování, což je dobře reflektováno i zmenšujícími se rozbíhavými oblastmi. 4.5 Zhodnocení geometrického kritéria Přestože výsledky pro 1. invertovaný M-M disk vyznívají ve prospěch geometrického kritéria, v případě 4. disku a Bachova-Weylova prstence už tak jednoznačné nejsou. Kritérium je pro různé zdroje gravitačního pole různě 51
52 věrohodné. Zatímco někdy stačí malá rozbíhavá oblast k tomu, aby uzavřené křivky téměř vymizely z Poincarého řezu, jindy se přítomnost oblasti o stejné relativní velikosti téměř vůbec neprojevuje. V jiných případech (oblast (+ +) u prstence) předpovídá geometrické kritérium chaos téměř s jistotou, přesto k jeho vzniku vůbec nedochází. Dá se tedy říci, že toto geometrické kritérium obecně není ani nutnou, ani postačující podmínkou ke vzniku chaosu. Většina článků týkající se geometrického kritéria (zvláště pak ty z posledních let) se nezabývá problémem z obecné relativity, ale z klasické či kvantové mechaniky, kde se využívá metrika (3.21), eventuálně tzv. Jacobiho metrika. V těchto článcích testují L. Horwitz a další (články [5] a [6]) geometrické kritérium na systémech jako je atom hélia či Henonův-Heilesův systém, a to s rozporuplnými závěry. Kriticky se k této geometrické metodě stavějí i P. Stránský a P. Cejnar, kteří metodu aplikovali v atomové a jaderné fyzice (viz [7]). Jak je poukazováno v článku od W. Vieiry a P. Leteliera [4], umělý přístup zavedení tzv. efektivní variety s Jacobiho metrikou s sebou nese řadu problémů, jako např. divergenci metriky na hranici povolené oblasti; nicméně tyto problémy nenastávají v obecné relativitě, kde se volné částice přirozeně pohybují po geodetikách na lorentzovské varietě. Relativistické formulaci se věnuje již zmíněný Sota a další ve svém článku [1], kde se rovněž zabývá vakuovými Weylovými prostoročasy. Obecně je v mnoha článcích zdůrazněna motivace najít invariantní indikátor chaosu, což různé tenzory křivosti a jejich vlastní čísla splňují lépe než např. Lyapunovovy exponenty, jejichž hodnota je závislá na zvolených souřadnicích (v obecné relativitě není čas absolutní). Hodnocení výsledků metody je pak velmi podobné jako v nerelativistickém případě (jak je uvedeno v [4]). Ať už se v literatuře použila jakákoliv metrika, vždy se použil buď přístup využívající vlastních čísel (ne nutně Weylova nebo Riemannova tenzoru), nebo metoda zprůměrování sekční křivosti, jež využívá ve svých článcích např. Szydłowski (články [2], [8] a [9]). Průměrná hodnota křivosti se tam počítá pomocí integrálu přes všechny možné rychlosti a deviační vektory. Výsledek takovéhoto 52
53 výpočtu je úměrný Ricciho skaláru, a tudíž je v našem případě nepoužitelný (ve vakuových prostoročasech je R = 0). K lepšímu pochopení zde uvažovaného geometrického kritéria by bylo dobré sledovat prostorové (přesněji prostoročasové) rozložení geodetik, abychom věděli, které geodetiky skutečně procházejí rozbíhavými oblastmi a které ne. Něco podobného bylo provedeno v článku [1] se spíše pozitivními výsledky pro geometrické kritérium, nicméně by bylo vhodné to testovat ve více případech, jelikož právě toto by nám mohlo napovědět, do jaké míry je dynamika našeho systému citlivá na lokální geometrii prostoročasu. Vykreslení oblastí prostoročasu podle signatury matice Weylova tenzoru neobsahuje tolik informací, jako obsahuje samotná rovnice geodetické deviace. Příkladem je samotná velikost vlastních čísel, kterou jsem zde v této práci vůbec neposuzoval. Zatímco vlastní čísla tenzoru A μ σ, pomocí kterého jsem vyjádřil potenciál (3.5), nezávisejí na čtyřrychlosti, vlastní podprostory A μ σ příslušející jednotlivým vlastním číslům už ano. Celkově tedy závisí nejen na konkrétním prostoročasu, jak rychle se v něm mění a jak velká jsou vlastní čísla, ale i na dané geodetice, která rozbíhavou oblastí prochází. Bylo by tedy vhodné numericky prozkoumat, zda při průchodu geodetiky danou rozbíhavou oblastí převažuje odpuzování/přitahování ve dvou téměř fixních směrech, nebo zda se naopak vlastní podprostory rychle mění a situace se podobá potenciálovému kopci nebo jámě. Otázkou také je, jak velká musí být rozbíhavá oblast, aby měla na procházející geodetiky s danou čtyřrychlostí vliv. Jak už bylo zmíněno v odstavci týkající se využití metody v klasické mechanice, divergence metriky může mít vliv na vznik chaotického chování systému, což je třeba brát v úvahu i v našem případě, jelikož přítomnost nekonečně tenkého disku či prstence má za následek divergenci metriky a jejích derivací v místě kde se daný zdroj gravitačního pole nachází. Bylo by tedy vhodné zaměřit se např. pouze na geodetiky neprocházející ekvatoriální rovinou, či obecněji na geodetiky procházející oblastí prostoročasu, která je dostatečně hladká. Ačkoliv jsem v žádném článku nenašel jednoznačný matematický argument, proč by geometrické kritérium nemělo fungovat a přestože v mnoha případech 53
54 existuje souvislost mezi znaménky vlastních čísel tenzoru křivosti a chaotickým pohybem, četné protipříklady ukazují, že geometrické kritérium chaosu není schopné spolehlivě předvídat chaotické chování systému. K bližšímu pochopení metody či k jejímu případnému vylepšení by byla nutná další numerická analýza. 54
55 Závěr Aplikoval jsem geometrické kritérium pro vznik geodetického chaosu na přesný statický a axiálně symetrický systém černé díry porušené přítomností disku či prstence. Výstupy metody jsem poté srovnal s numerickými výsledky v podobě Poincarého řezů. V případě 1. invertovaného disku Morgana a Morganové fungovalo kritérium spolehlivě. U 4. disku docházelo ke ztrátě citlivosti a metoda přestávala dávat dobré předpovědi. Výsledky pro Bachův-Weylův prstenec nebyly tak špatné, jak by se mohlo na první pohled zdát, ale některé Poincarého řezy byly ke srovnání nevhodné a v případě několika obrázků docházelo ke zjevným rozporům mezi geometrickým kritériem a numerickými výsledky. Pokud by se podařilo najít spolehlivý lokální indikátor chaosu, dostali bychom nástroj, s jehož pomocí bychom mohli charakterizovat míru chaotického chování bez explicitního řešení pohybových rovnic. Ať už takovéto kritérium existuje, nebo ne, je zřejmé, že jeho hledáním lépe porozumíme původu a projevům deterministického chaosu. 55
56 Literatura [1] Y. Sota, S. Suzuki, K. Maeda, Class. Quantum Grav. 13 (1996) 1241 [2] M. Szydłowski, J. Math. Phys. 35 (4) (1994) 1850 [3] O. Semerák, P. Suková, Mon. Not. R. Astron. Soc. 404 (2010) 545 [4] W. M. Vieira, P. S. Letelier, Class. Quantum Grav. 13 (1996) 3115 [5] L. Horwitz, Y. B. Zion, M. Lewkowicz, M. Schiffer, J. Levitan, Phys. Rev. Lett. (2007) [6] E. Calderon, L. Horwitz, R. Kupferman, S. Shnider, Chaos 23 (2013) [7] P. Stránský, P. Cejnar, J. Phys. A: Math. Theor. 48 (2015) [8] M. Szydłowski, Phys. Lett. A 201 (1995) 19 [9] M. Szydłowski, Phys. Lett. A 176 (1993) 22 [10] M. Cencini, F. Cecconi, A. Vulpiani, Chaos From Simple models to complex systems (World Scientific, Singapore, September 2009) [11] M. Lakshmanan, S. Rajaseekar, Nonlinear Dynamics: Integrability, Chaos and Patterns (Springer-Verlag: Berlin, Germany, 2003) [12] [13] [14] [15] [16] S. Carroll, Spacetime and Geometry: An Introduction to General Relativity (Addison-Wesley, San Francisco 2004) [17] J. B. Griffiths, J. Podolský: Exact Space-Times in Einstein's General Relativity, (Cambridge University Press, Cambridge 2009) [18] D. Puetzfeld, C. Lämmerzahl, B. Schutz: Equations of Motion in Relativistic Gravity (Springer International Publishing, Switzerland, 2015) 56
Úvodní informace. 17. února 2018
 Úvodní informace Funkce více proměnných Přednáška první 17. února 2018 Obsah 1 Úvodní informace. 2 Funkce více proměnných Definiční obor Limita a spojitost Derivace, diferencovatelnost, diferenciál Úvodní
Úvodní informace Funkce více proměnných Přednáška první 17. února 2018 Obsah 1 Úvodní informace. 2 Funkce více proměnných Definiční obor Limita a spojitost Derivace, diferencovatelnost, diferenciál Úvodní
Elektromagnetické pole je generováno elektrickými náboji a jejich pohybem. Je-li zdroj charakterizován nábojovou hustotou ( r r
 Záření Hertzova dipólu, kulové vlny, Rovnice elektromagnetického pole jsou vektorové diferenciální rovnice a podle symetrie bývá vhodné je řešit v křivočarých souřadnicích. Základní diferenciální operátory
Záření Hertzova dipólu, kulové vlny, Rovnice elektromagnetického pole jsou vektorové diferenciální rovnice a podle symetrie bývá vhodné je řešit v křivočarých souřadnicích. Základní diferenciální operátory
Definice 1.1. Nechť je M množina. Funkci ρ : M M R nazveme metrikou, jestliže má následující vlastnosti:
 Přednáška 1. Definice 1.1. Nechť je množina. Funkci ρ : R nazveme metrikou, jestliže má následující vlastnosti: (1 pro každé x je ρ(x, x = 0; (2 pro každé x, y, x y, je ρ(x, y = ρ(y, x > 0; (3 pro každé
Přednáška 1. Definice 1.1. Nechť je množina. Funkci ρ : R nazveme metrikou, jestliže má následující vlastnosti: (1 pro každé x je ρ(x, x = 0; (2 pro každé x, y, x y, je ρ(x, y = ρ(y, x > 0; (3 pro každé
5. Lokální, vázané a globální extrémy
 5 Lokální, vázané a globální extrémy Studijní text Lokální extrémy 5 Lokální, vázané a globální extrémy Definice 51 Řekneme, že f : R n R má v bodě a Df: 1 lokální maximum, když Ka, δ Df tak, že x Ka,
5 Lokální, vázané a globální extrémy Studijní text Lokální extrémy 5 Lokální, vázané a globální extrémy Definice 51 Řekneme, že f : R n R má v bodě a Df: 1 lokální maximum, když Ka, δ Df tak, že x Ka,
Úlohy nejmenších čtverců
 Úlohy nejmenších čtverců Petr Tichý 7. listopadu 2012 1 Problémy nejmenších čtverců Ax b Řešení Ax = b nemusí existovat, a pokud existuje, nemusí být jednoznačné. Často má smysl hledat x tak, že Ax b.
Úlohy nejmenších čtverců Petr Tichý 7. listopadu 2012 1 Problémy nejmenších čtverců Ax b Řešení Ax = b nemusí existovat, a pokud existuje, nemusí být jednoznačné. Často má smysl hledat x tak, že Ax b.
KLASICKÁ MECHANIKA. Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny.
 MECHANIKA 1 KLASICKÁ MECHANIKA Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny. Klasická mechanika rychlosti těles jsou mnohem menší než rychlost světla ve
MECHANIKA 1 KLASICKÁ MECHANIKA Předmětem mechaniky matematický popis mechanického pohybu v prostoru a v čase a jeho příčiny. Klasická mechanika rychlosti těles jsou mnohem menší než rychlost světla ve
Matematika 1 MA1. 1 Analytická geometrie v prostoru - základní pojmy. 4 Vzdálenosti. 12. přednáška ( ) Matematika 1 1 / 32
 Matematika 1 1 / 32") Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
Práce, energie a další mechanické veličiny
 Práce, energie a další mechanické veličiny Úvod V předchozích přednáškách jsme zavedli základní mechanické veličiny (rychlost, zrychlení, síla, ) Popis fyzikálních dějů usnadňuje zavedení dalších fyzikálních
Práce, energie a další mechanické veličiny Úvod V předchozích přednáškách jsme zavedli základní mechanické veličiny (rychlost, zrychlení, síla, ) Popis fyzikálních dějů usnadňuje zavedení dalších fyzikálních
Skalární a vektorový popis silového pole
 Skalární a vektorový popis silového pole Elektrické pole Elektrický náboj Q [Q] = C Vlastnost materiálových objektů Interakce (vzájemné silové působení) Interakci (vzájemné silové působení) mezi dvěma
Skalární a vektorový popis silového pole Elektrické pole Elektrický náboj Q [Q] = C Vlastnost materiálových objektů Interakce (vzájemné silové působení) Interakci (vzájemné silové působení) mezi dvěma
12 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ
 56 12 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Těžiště I. impulsová věta - věta o pohybu těžiště II. impulsová věta Zákony zachování v izolované soustavě hmotných bodů Náhrada pohybu skutečných objektů pohybem
56 12 DYNAMIKA SOUSTAVY HMOTNÝCH BODŮ Těžiště I. impulsová věta - věta o pohybu těžiště II. impulsová věta Zákony zachování v izolované soustavě hmotných bodů Náhrada pohybu skutečných objektů pohybem
Gyrační poloměr jako invariant relativistického pohybu. 2 Nerovnoměrný pohyb po kružnici v R 2
 Gyrační poloměr jako invariant relativistického pohybu nabité částice v konfiguraci rovnoběžného konstantního vnějšího elektromagnetického pole 1 Popis problému Uvažujme pohyb nabité částice v E 3 v takové
Gyrační poloměr jako invariant relativistického pohybu nabité částice v konfiguraci rovnoběžného konstantního vnějšího elektromagnetického pole 1 Popis problému Uvažujme pohyb nabité částice v E 3 v takové
1 Rozdělení mechaniky a její náplň
 1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
1 Rozdělení mechaniky a její náplň Mechanika je nauka o rovnováze a pohybu hmotných útvarů pohybujících se rychlostí podstatně menší, než je rychlost světla (v c). Vlastnosti skutečných hmotných útvarů
terminologie předchozí kapitoly: (ϕ, Ω) - plocha, S - geometrický obraz plochy
 - plocha, S - geometrický obraz plochy") 2. Plošný integrál. Poznámka. Obecně: integrování přes k-rozměrné útvary (k-plochy) v R n. Omezíme se na případ k = 2, n = 3. Definice. Množina S R 3 se nazve plocha, pokud S = ϕ(), kde R 2 je otevřená
2. Plošný integrál. Poznámka. Obecně: integrování přes k-rozměrné útvary (k-plochy) v R n. Omezíme se na případ k = 2, n = 3. Definice. Množina S R 3 se nazve plocha, pokud S = ϕ(), kde R 2 je otevřená
Dnešní látka: Literatura: Kapitoly 3 a 4 ze skript Karel Rektorys: Matematika 43, ČVUT, Praha, Text přednášky na webové stránce přednášejícího.
 Předmět: MA4 Dnešní látka: Od okrajových úloh v 1D k o. ú. ve 2D Laplaceův diferenciální operátor Variačně formulované okrajové úlohy pro parciální diferenciální rovnice a metody jejich přibližného řešení
Předmět: MA4 Dnešní látka: Od okrajových úloh v 1D k o. ú. ve 2D Laplaceův diferenciální operátor Variačně formulované okrajové úlohy pro parciální diferenciální rovnice a metody jejich přibližného řešení
Dnešní látka Variačně formulované okrajové úlohy zúplnění prostoru funkcí. Lineární zobrazení.
 Předmět: MA4 Dnešní látka Variačně formulované okrajové úlohy zúplnění prostoru funkcí. Lineární zobrazení. Literatura: Kapitola 2 a)-c) a kapitola 4 a)-c) ze skript Karel Rektorys: Matematika 43, ČVUT,
Předmět: MA4 Dnešní látka Variačně formulované okrajové úlohy zúplnění prostoru funkcí. Lineární zobrazení. Literatura: Kapitola 2 a)-c) a kapitola 4 a)-c) ze skript Karel Rektorys: Matematika 43, ČVUT,
Příklad 3 (25 bodů) Jakou rychlost musí mít difrakčním úhlu 120? -částice, abychom pozorovali difrakční maximum od rovin d hkl = 0,82 Å na
 Jakou rychlost musí mít difrakčním úhlu 120? -částice, abychom pozorovali difrakční maximum od rovin d hkl = 0,82 Å na") Přijímací zkouška z fyziky 01 - Nav. Mgr. - varianta A Příklad 1 (5 bodů) Koule o poloměru R=10 cm leží na vodorovné rovině. Z jejího nejvyššího bodu vypustíme s nulovou počáteční rychlostí bod o hmotností
Přijímací zkouška z fyziky 01 - Nav. Mgr. - varianta A Příklad 1 (5 bodů) Koule o poloměru R=10 cm leží na vodorovné rovině. Z jejího nejvyššího bodu vypustíme s nulovou počáteční rychlostí bod o hmotností
MATEMATIKA II - vybrané úlohy ze zkoušek ( 2015)
") MATEMATIKA II - vybrané úlohy ze zkoušek ( 2015 doplněné o další úlohy 13. 4. 2015 Nalezené nesrovnalosti ve výsledcích nebo připomínky k tomuto souboru sdělte laskavě F. Mrázovi ( e-mail: Frantisek.Mraz@fs.cvut.cz.
MATEMATIKA II - vybrané úlohy ze zkoušek ( 2015 doplněné o další úlohy 13. 4. 2015 Nalezené nesrovnalosti ve výsledcích nebo připomínky k tomuto souboru sdělte laskavě F. Mrázovi ( e-mail: Frantisek.Mraz@fs.cvut.cz.
Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené
 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené") 2. 3. 2018 Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
2. 3. 2018 Matematika II, úroveň A ukázkový test č. 1 (2018) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
1.13 Klasifikace kvadrik
 5 KAPITOLA 1. KVADRIKY JAKO PLOCHY. STUPNĚ 1.13 Klasifikace kvadrik V této části provedeme klasifikaci kvadrik. Vyšetříme všechny případy, které mohou různou volbou koeficientů v rovnici kvadriky a 11
5 KAPITOLA 1. KVADRIKY JAKO PLOCHY. STUPNĚ 1.13 Klasifikace kvadrik V této části provedeme klasifikaci kvadrik. Vyšetříme všechny případy, které mohou různou volbou koeficientů v rovnici kvadriky a 11
1. Náhodný vektor (X, Y ) má diskrétní rozdělení s pravděpodobnostní funkcí p, kde. p(x, y) = a(x + y + 1), x, y {0, 1, 2}.
 má diskrétní rozdělení s pravděpodobnostní funkcí p, kde. p(x, y) = a(x + y + 1), x, y {0, 1, 2}.") VIII. Náhodný vektor. Náhodný vektor (X, Y má diskrétní rozdělení s pravděpodobnostní funkcí p, kde p(x, y a(x + y +, x, y {,, }. a Určete číslo a a napište tabulku pravděpodobnostní funkce p. Řešení:
VIII. Náhodný vektor. Náhodný vektor (X, Y má diskrétní rozdělení s pravděpodobnostní funkcí p, kde p(x, y a(x + y +, x, y {,, }. a Určete číslo a a napište tabulku pravděpodobnostní funkce p. Řešení:
plochy oddělí. Dále určete vzdálenost d mezi místem jeho dopadu na
 Přijímací zkouška z fyziky 01 - Nav. Mgr. - varianta A Příklad 1 (5 bodů) Koule o poloměru R=10 cm leží na vodorovné rovině. Z jejího nejvyššího bodu vypustíme s nulovou počáteční rychlostí bod o hmotností
Přijímací zkouška z fyziky 01 - Nav. Mgr. - varianta A Příklad 1 (5 bodů) Koule o poloměru R=10 cm leží na vodorovné rovině. Z jejího nejvyššího bodu vypustíme s nulovou počáteční rychlostí bod o hmotností
Co jsme udělali: Au = f, u D(A)
") Předmět: MA4 Dnešní látka: Od okrajových úloh v 1D k o. ú. ve 2D Laplaceův diferenciální operátor Variačně formulované okrajové úlohy pro parciální diferenciální rovnice a metody jejich přibližného řešení
Předmět: MA4 Dnešní látka: Od okrajových úloh v 1D k o. ú. ve 2D Laplaceův diferenciální operátor Variačně formulované okrajové úlohy pro parciální diferenciální rovnice a metody jejich přibližného řešení
13. cvičení z Matematické analýzy 2
 . cvičení z atematické analýz 2 5. - 9. května 27. konzervativní pole, potenciál Dokažte, že následující pole jsou konzervativní a najděte jejich potenciál. i F x,, z x 2 +, 2 + x, ze z, ii F x,, z x 2
. cvičení z atematické analýz 2 5. - 9. května 27. konzervativní pole, potenciál Dokažte, že následující pole jsou konzervativní a najděte jejich potenciál. i F x,, z x 2 +, 2 + x, ze z, ii F x,, z x 2
Dvojné a trojné integrály příklad 3. x 2 y dx dy,
 Spočtěte = { x, y) ; 4x + y 4 }. Dvojné a trojné integrály příklad 3 x y dx dy, Řešení: Protože obor integrace je symetrický vzhledem k ose x, tj. vzhledem k substituci [x; y] [x; y], a funkce fx, y) je
Spočtěte = { x, y) ; 4x + y 4 }. Dvojné a trojné integrály příklad 3 x y dx dy, Řešení: Protože obor integrace je symetrický vzhledem k ose x, tj. vzhledem k substituci [x; y] [x; y], a funkce fx, y) je
1 Linearní prostory nad komplexními čísly
 1 Linearní prostory nad komplexními čísly V této přednášce budeme hledat kořeny polynomů, které se dále budou moci vyskytovat jako složky vektorů nebo matic Vzhledem k tomu, že kořeny polynomu (i reálného)
1 Linearní prostory nad komplexními čísly V této přednášce budeme hledat kořeny polynomů, které se dále budou moci vyskytovat jako složky vektorů nebo matic Vzhledem k tomu, že kořeny polynomu (i reálného)
Kvantová mechanika bez prostoročasu
 Natura 30. listopadu 2002 Kvantová mechanika bez prostoročasu zpracoval: Jiří Svršek 1 podle článku T. P. Singha Abstract Pravidla kvantové mechaniky pro svoji formulaci vyžadují časovou souřadnici. Pojem
Natura 30. listopadu 2002 Kvantová mechanika bez prostoročasu zpracoval: Jiří Svršek 1 podle článku T. P. Singha Abstract Pravidla kvantové mechaniky pro svoji formulaci vyžadují časovou souřadnici. Pojem
4. Napjatost v bodě tělesa
 p04 1 4. Napjatost v bodě tělesa Předpokládejme, že bod C je nebezpečným bodem tělesa a pro zabránění vzniku mezních stavů je m.j. třeba zaručit, že napětí v tomto bodě nepřesáhne definované mezní hodnoty.
p04 1 4. Napjatost v bodě tělesa Předpokládejme, že bod C je nebezpečným bodem tělesa a pro zabránění vzniku mezních stavů je m.j. třeba zaručit, že napětí v tomto bodě nepřesáhne definované mezní hodnoty.
Lineární zobrazení. 1. A(x y) = A(x) A(y) (vlastnost aditivity) 2. A(α x) = α A(x) (vlastnost homogenity)
 = A(x) A(y) (vlastnost aditivity) 2. A(α x) = α A(x) (vlastnost homogenity)") 4 Lineární zobrazení Definice: Nechť V a W jsou vektorové prostory Zobrazení A : V W (zobrazení z V do W nazýváme lineárním zobrazením, pokud pro všechna x V, y V a α R platí 1 A(x y = A(x A(y (vlastnost
4 Lineární zobrazení Definice: Nechť V a W jsou vektorové prostory Zobrazení A : V W (zobrazení z V do W nazýváme lineárním zobrazením, pokud pro všechna x V, y V a α R platí 1 A(x y = A(x A(y (vlastnost
MATEMATIKA II - vybrané úlohy ze zkoušek v letech
 MATEMATIKA II - vybrané úlohy ze zkoušek v letech 2009 2012 doplněné o další úlohy 3. část KŘIVKOVÉ INTEGRÁLY, GREENOVA VĚTA, POTENIÁLNÍ POLE, PLOŠNÉ INTEGRÁLY, GAUSSOVA OSTROGRADSKÉHO VĚTA 7. 4. 2013
MATEMATIKA II - vybrané úlohy ze zkoušek v letech 2009 2012 doplněné o další úlohy 3. část KŘIVKOVÉ INTEGRÁLY, GREENOVA VĚTA, POTENIÁLNÍ POLE, PLOŠNÉ INTEGRÁLY, GAUSSOVA OSTROGRADSKÉHO VĚTA 7. 4. 2013
Zavedeme-li souřadnicový systém {0, x, y, z}, pak můžeme křivku definovat pomocí vektorové funkce.
 KŘIVKY Křivka = dráha pohybujícího se bodu = = množina nekonečného počtu bodů, které závisí na parametru (čase). Proto můžeme křivku také nazvat jednoparametrickou množinou bodů. Zavedeme-li souřadnicový
KŘIVKY Křivka = dráha pohybujícího se bodu = = množina nekonečného počtu bodů, které závisí na parametru (čase). Proto můžeme křivku také nazvat jednoparametrickou množinou bodů. Zavedeme-li souřadnicový
Matematika II, úroveň A ukázkový test č. 1 (2017) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené
 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené") 28. 2. 2017 Matematika II, úroveň A ukázkový test č. 1 (2017) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
28. 2. 2017 Matematika II, úroveň A ukázkový test č. 1 (2017) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
ANALYTICKÁ GEOMETRIE V ROVINĚ
 ANALYTICKÁ GEOMETRIE V ROVINĚ Analytická geometrie vyšetřuje geometrické objekty (body, přímky, kuželosečky apod.) analytickými metodami. Podle prostoru, ve kterém pracujeme, můžeme analytickou geometrii
ANALYTICKÁ GEOMETRIE V ROVINĚ Analytická geometrie vyšetřuje geometrické objekty (body, přímky, kuželosečky apod.) analytickými metodami. Podle prostoru, ve kterém pracujeme, můžeme analytickou geometrii
1 Analytická geometrie
 1 Analytická geometrie 11 Přímky Necht A E 3 a v R 3 je nenulový Pak p = A + v = {X E 3 X = A + tv, t R}, je přímka procházející bodem A se směrovým vektorem v Rovnici X = A + tv, t R, říkáme bodová rovnice
1 Analytická geometrie 11 Přímky Necht A E 3 a v R 3 je nenulový Pak p = A + v = {X E 3 X = A + tv, t R}, je přímka procházející bodem A se směrovým vektorem v Rovnici X = A + tv, t R, říkáme bodová rovnice
8.3). S ohledem na jednoduchost a názornost je výhodné seznámit se s touto Základní pojmy a vztahy. Definice
. S ohledem na jednoduchost a názornost je výhodné seznámit se s touto Základní pojmy a vztahy. Definice") 9. Lineární diferenciální rovnice 2. řádu Cíle Diferenciální rovnice, v nichž hledaná funkce vystupuje ve druhé či vyšší derivaci, nazýváme diferenciálními rovnicemi druhého a vyššího řádu. Analogicky
9. Lineární diferenciální rovnice 2. řádu Cíle Diferenciální rovnice, v nichž hledaná funkce vystupuje ve druhé či vyšší derivaci, nazýváme diferenciálními rovnicemi druhého a vyššího řádu. Analogicky
10. cvičení z Matematické analýzy 2
 . cvičení z Matematické analýzy 3. - 7. prosince 8. (dvojný integrál - Fubiniho věta Vhodným způsobem integrace spočítejte daný integrál a načrtněte oblast integrace (a (b (c y ds, kde : y & y 4. e ma{,y
. cvičení z Matematické analýzy 3. - 7. prosince 8. (dvojný integrál - Fubiniho věta Vhodným způsobem integrace spočítejte daný integrál a načrtněte oblast integrace (a (b (c y ds, kde : y & y 4. e ma{,y
3.1. Newtonovy zákony jsou základní zákony klasické (Newtonovy) mechaniky
 mechaniky") 3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
3. ZÁKLADY DYNAMIKY Dynamika zkoumá příčinné souvislosti pohybu a je tedy zdůvodněním zákonů kinematiky. K pojmům používaným v kinematice zavádí pojem hmoty a síly. Statický výpočet Dynamický výpočet -
Přijímací zkouška na navazující magisterské studium 2015
 Přijímací zkouška na navazující magisterské studium 205 Studijní program: Studijní obory: Fyzika FFUM Varianta A Řešení příkladů pečlivě odůvodněte. Příklad (25 bodů) Pro funkci f(x) := e x 2. Určete definiční
Přijímací zkouška na navazující magisterské studium 205 Studijní program: Studijní obory: Fyzika FFUM Varianta A Řešení příkladů pečlivě odůvodněte. Příklad (25 bodů) Pro funkci f(x) := e x 2. Určete definiční
Matematika II, úroveň A ukázkový test č. 1 (2016) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené
 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené") 22. 2. 2016 Matematika II, úroveň A ukázkový test č. 1 (2016) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
22. 2. 2016 Matematika II, úroveň A ukázkový test č. 1 (2016) 1. a) Napište postačující podmínku pro diferencovatelnost funkce n-proměnných v otevřené mn. M E n. Zapište a načrtněte množinu D, ve které
Relativistická kinematika
 Relativistická kinematika 1 Formalismus čtyřhybnosti Pro řešení relativistických kinematických úloh lze často s výhodou použít formalismus čtyřhybnosti. Čtyřhybnost je čtyřvektor, který v sobě zahrnuje
Relativistická kinematika 1 Formalismus čtyřhybnosti Pro řešení relativistických kinematických úloh lze často s výhodou použít formalismus čtyřhybnosti. Čtyřhybnost je čtyřvektor, který v sobě zahrnuje
Přijímací zkouška na navazující magisterské studium Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy
 Přijímací zkouška na navazující magisterské studium 013 Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy Studijní program Učitelství pro základní školy - obor Učitelství fyziky
Přijímací zkouška na navazující magisterské studium 013 Studijní program Fyzika obor Učitelství fyziky matematiky pro střední školy Studijní program Učitelství pro základní školy - obor Učitelství fyziky
Seriál II.II Vektory. Výfučtení: Vektory
 Výfučtení: Vektory Abychom zcela vyjádřili veličiny jako hmotnost, teplo či náboj, stačí nám k tomu jediné číslo (s příslušnou jednotkou). Říkáme jim skalární veličiny. Běžně se však setkáváme i s veličinami,
Výfučtení: Vektory Abychom zcela vyjádřili veličiny jako hmotnost, teplo či náboj, stačí nám k tomu jediné číslo (s příslušnou jednotkou). Říkáme jim skalární veličiny. Běžně se však setkáváme i s veličinami,
Q(y) dy = P(x) dx + C.
 dy = P(x) dx + C.") Cíle Naše nejbližší cíle spočívají v odpovědích na základní otázky, které si klademe v souvislosti s diferenciálními rovnicemi: 1. Má rovnice řešení? 2. Kolik je řešení a jakého jsou typu? 3. Jak se tato
Cíle Naše nejbližší cíle spočívají v odpovědích na základní otázky, které si klademe v souvislosti s diferenciálními rovnicemi: 1. Má rovnice řešení? 2. Kolik je řešení a jakého jsou typu? 3. Jak se tato
11. cvičení z Matematické analýzy 2
 11. cvičení z Matematické analýzy 11. - 15. prosince 17 11.1 (trojný integrál - Fubiniho věta) Vypočtěte (i) xyz dv, kde je ohraničeno plochami y x, x y, z xy a z. (ii) y dv, kde je ohraničeno shora rovinou
11. cvičení z Matematické analýzy 11. - 15. prosince 17 11.1 (trojný integrál - Fubiniho věta) Vypočtěte (i) xyz dv, kde je ohraničeno plochami y x, x y, z xy a z. (ii) y dv, kde je ohraničeno shora rovinou
Lineární algebra : Metrická geometrie
 Lineární algebra : Metrická geometrie (16. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 6. května 2014, 10:42 1 2 Úvod Zatím jsme se lineární geometrii věnovali v kapitole o lineárních
Lineární algebra : Metrická geometrie (16. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 6. května 2014, 10:42 1 2 Úvod Zatím jsme se lineární geometrii věnovali v kapitole o lineárních
Úvod do analytické mechaniky
 Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Úvod do analytické mechaniky Vektorová mechanika, která je někdy nazývána jako Newtonova, vychází bezprostředně z principů, které jsou vyjádřeny vztahy mezi vektorovými veličinami. V tomto případě např.
Obecný Hookeův zákon a rovinná napjatost
 Obecný Hookeův zákon a rovinná napjatost Základní rovnice popisující napěťově-deformační chování materiálu při jednoosém namáhání jsou Hookeův zákon a Poissonův zákon. σ = E ε odtud lze vyjádřit také poměrnou
Obecný Hookeův zákon a rovinná napjatost Základní rovnice popisující napěťově-deformační chování materiálu při jednoosém namáhání jsou Hookeův zákon a Poissonův zákon. σ = E ε odtud lze vyjádřit také poměrnou
6 Lineární geometrie. 6.1 Lineární variety
 6 Lineární geometrie Motivace. Pojem lineární varieta, který budeme v této kapitole studovat z nejrůznějších úhlů pohledu, není žádnou umělou konstrukcí. Příkladem lineární variety je totiž množina řešení
6 Lineární geometrie Motivace. Pojem lineární varieta, který budeme v této kapitole studovat z nejrůznějších úhlů pohledu, není žádnou umělou konstrukcí. Příkladem lineární variety je totiž množina řešení
Obsah PŘEDMLUVA...9 ÚVOD TEORETICKÁ MECHANIKA...15
 Obsah PŘEDMLUVA...9 ÚVOD...11 1. TEORETICKÁ MECHANIKA...15 1.1 INTEGRÁLNÍ PRINCIPY MECHANIKY... 16 1.1.1 Základní pojmy z mechaniky... 16 1.1.2 Integrální principy... 18 1.1.3 Hamiltonův princip nejmenší
Obsah PŘEDMLUVA...9 ÚVOD...11 1. TEORETICKÁ MECHANIKA...15 1.1 INTEGRÁLNÍ PRINCIPY MECHANIKY... 16 1.1.1 Základní pojmy z mechaniky... 16 1.1.2 Integrální principy... 18 1.1.3 Hamiltonův princip nejmenší
Elementární křivky a plochy
 Příloha A Elementární křivky a plochy A.1 Analytický popis geometrických objektů Geometrické vlastnosti, které jsme dosud studovali, se týkaly především základních geometrických objektů bodů, přímek, rovin
Příloha A Elementární křivky a plochy A.1 Analytický popis geometrických objektů Geometrické vlastnosti, které jsme dosud studovali, se týkaly především základních geometrických objektů bodů, přímek, rovin
Nelineární systémy a teorie chaosu
 Martin Duspiva KOIF2-2007/2008 Definice Lineární systém splňuje podmínky linearita: f (x + y) = f (x) + f (y) aditivita: f (αx) = αf (x) Každý systém, který nesplňuje jednu z předchozích podmínek nazveme
Martin Duspiva KOIF2-2007/2008 Definice Lineární systém splňuje podmínky linearita: f (x + y) = f (x) + f (y) aditivita: f (αx) = αf (x) Každý systém, který nesplňuje jednu z předchozích podmínek nazveme
Vlastní čísla a vlastní vektory
 5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
Diferenciální rovnice 1
 Diferenciální rovnice 1 Základní pojmy Diferenciální rovnice n-tého řádu v implicitním tvaru je obecně rovnice ve tvaru,,,, = Řád diferenciální rovnice odpovídá nejvyššímu stupni derivace v rovnici použitému.
Diferenciální rovnice 1 Základní pojmy Diferenciální rovnice n-tého řádu v implicitním tvaru je obecně rovnice ve tvaru,,,, = Řád diferenciální rovnice odpovídá nejvyššímu stupni derivace v rovnici použitému.
Požadavky k písemné přijímací zkoušce z matematiky do navazujícího magisterského studia pro neučitelské obory
 Požadavky k písemné přijímací zkoušce z matematiky do navazujícího magisterského studia pro neučitelské obory Zkouška ověřuje znalost základních pojmů, porozumění teorii a schopnost aplikovat teorii při
Požadavky k písemné přijímací zkoušce z matematiky do navazujícího magisterského studia pro neučitelské obory Zkouška ověřuje znalost základních pojmů, porozumění teorii a schopnost aplikovat teorii při
Dynamika tekutin popisuje kinematiku (pohyb částice v času a prostoru) a silové působení v tekutině.
 a silové působení v tekutině.") Dynamika tekutin popisuje kinematiku (pohyb částice v času a prostoru) a silové působení v tekutině. Přehled proudění Vazkost - nevazké - vazké (newtonské, nenewtonské) Stlačitelnost - nestlačitelné (kapaliny
Dynamika tekutin popisuje kinematiku (pohyb částice v času a prostoru) a silové působení v tekutině. Přehled proudění Vazkost - nevazké - vazké (newtonské, nenewtonské) Stlačitelnost - nestlačitelné (kapaliny
21. Úvod do teorie parciálních diferenciálních rovnic
 21. Úvod do teorie parciálních diferenciálních rovnic Aplikovaná matematika IV, NMAF074 M. Rokyta, KMA MFF UK LS 2014/15 21.1 Základní termíny Definice Vektor tvaru α = (α 1,...,α m ), kde α j N {0}, j
21. Úvod do teorie parciálních diferenciálních rovnic Aplikovaná matematika IV, NMAF074 M. Rokyta, KMA MFF UK LS 2014/15 21.1 Základní termíny Definice Vektor tvaru α = (α 1,...,α m ), kde α j N {0}, j
Nejdřív spočítáme jeden příklad na variaci konstant pro lineární diferenciální rovnici 2. řádu s kostantními koeficienty. y + y = 4 sin t.
 1 Variace konstanty Nejdřív spočítáme jeden příklad na variaci konstant pro lineární diferenciální rovnici 2. řádu s kostantními koeficienty. Příklad 1 Najděte obecné řešení rovnice: y + y = 4 sin t. Co
1 Variace konstanty Nejdřív spočítáme jeden příklad na variaci konstant pro lineární diferenciální rovnici 2. řádu s kostantními koeficienty. Příklad 1 Najděte obecné řešení rovnice: y + y = 4 sin t. Co
ρ = 0 (nepřítomnost volných nábojů)
") Učební text k přednášce UFY Světlo v izotropním látkovém prostředí Maxwellovy rovnice v izotropním látkovém prostředí: B rot + D rot H ( r, t) div D ρ rt, ( ) div B a materiálové vztahy D ε pro dielektrika
Učební text k přednášce UFY Světlo v izotropním látkovém prostředí Maxwellovy rovnice v izotropním látkovém prostředí: B rot + D rot H ( r, t) div D ρ rt, ( ) div B a materiálové vztahy D ε pro dielektrika
Dynamika soustav hmotných bodů
 Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
Dynamika soustav hmotných bodů Mechanický model, jehož pohyb je charakterizován pohybem dvou nebo více bodů, nazýváme soustavu hmotných bodů. Pro každý hmotný bod můžeme napsat pohybovou rovnici. Tedy
PŘEDNÁŠKA 9 KŘIVKOVÝ A PLOŠNÝ INTEGRÁL 1. DRUHU
 PŘEDNÁŠKA 9 KŘIVKOVÝ A PLOŠNÝ INTEGRÁL 1. DRUHU 6.1 Křivkový integrál 1. druhu Definice 1. Množina R n se nazývá prostá regulární křivka v R n právě tehdy, když existuje vzájemně jednoznačné zobrazení
PŘEDNÁŠKA 9 KŘIVKOVÝ A PLOŠNÝ INTEGRÁL 1. DRUHU 6.1 Křivkový integrál 1. druhu Definice 1. Množina R n se nazývá prostá regulární křivka v R n právě tehdy, když existuje vzájemně jednoznačné zobrazení
10 Funkce více proměnných
 M. Rokyta, MFF UK: Aplikovaná matematika II kap. 10: Funkce více proměnných 16 10 Funkce více proměnných 10.1 Základní pojmy Definice. Eukleidovskou vzdáleností bodů x = (x 1,...,x n ), y = (y 1,...,y
M. Rokyta, MFF UK: Aplikovaná matematika II kap. 10: Funkce více proměnných 16 10 Funkce více proměnných 10.1 Základní pojmy Definice. Eukleidovskou vzdáleností bodů x = (x 1,...,x n ), y = (y 1,...,y
Řešení 1b Máme najít body, v nichž má funkce (, ) vázané extrémy, případně vázané lokální extrémy s podmínkou (, )=0, je-li: (, )= +,
 vázané extrémy, případně vázané lokální extrémy s podmínkou (, )=0, je-li: (, )= +,") Příklad 1 Najděte body, v nichž má funkce (,) vázané extrémy, případně vázané lokální extrémy s podmínkou (,)=0, je-li: a) (,)= + 1, (,)=+ 1 lok.max.v 1 2,3 2 b) (,)=+, (,)= 1 +1 1 c) (,)=, (,)=+ 1 lok.max.v
Příklad 1 Najděte body, v nichž má funkce (,) vázané extrémy, případně vázané lokální extrémy s podmínkou (,)=0, je-li: a) (,)= + 1, (,)=+ 1 lok.max.v 1 2,3 2 b) (,)=+, (,)= 1 +1 1 c) (,)=, (,)=+ 1 lok.max.v
1.1 Existence a jednoznačnost řešení. Příklad 1.1: [M2-P1] diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu
![1.1 Existence a jednoznačnost řešení. Příklad 1.1: [M2-P1] diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu](/thumbs/102/155926571.jpg "1.1 Existence a jednoznačnost řešení. Příklad 1.1: [M2-P1] diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu") [M2-P1] KAPITOLA 1: Diferenciální rovnice 1. řádu diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu G(x, y, y, y,..., y (n) ) = 0 y (n) = F (x, y, y,..., y (n 1) ) Příklad 1.1:
[M2-P1] KAPITOLA 1: Diferenciální rovnice 1. řádu diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu G(x, y, y, y,..., y (n) ) = 0 y (n) = F (x, y, y,..., y (n 1) ) Příklad 1.1:
Funkce v ıce promˇ enn ych Extr emy Pˇredn aˇska p at a 12.bˇrezna 2018
 Funkce více proměnných Extrémy Přednáška pátá 12.března 2018 Zdroje informací Diferenciální počet http://homen.vsb.cz/~kre40/esfmat2/fceviceprom.html http://www.studopory.vsb.cz/studijnimaterialy/sbirka_uloh/pdf/7.pdf
Funkce více proměnných Extrémy Přednáška pátá 12.března 2018 Zdroje informací Diferenciální počet http://homen.vsb.cz/~kre40/esfmat2/fceviceprom.html http://www.studopory.vsb.cz/studijnimaterialy/sbirka_uloh/pdf/7.pdf
Mnohé problémy analýzy dynamických systémů vedou k řešení diferenciální rovnice (4.1)
") 4 Řešení odezev dynamických systémů ve fázové rovině 4.1 Základní pojmy teorie fázové roviny Mnohé problémy analýzy dynamických systémů vedou k řešení diferenciální rovnice ( ) x+ F x, x = (4.1) kde F(
4 Řešení odezev dynamických systémů ve fázové rovině 4.1 Základní pojmy teorie fázové roviny Mnohé problémy analýzy dynamických systémů vedou k řešení diferenciální rovnice ( ) x+ F x, x = (4.1) kde F(
Necht L je lineární prostor nad R. Operaci : L L R nazýváme
 Skalární součin axiomatická definice odvození velikosti vektorů a úhlu mezi vektory geometrická interpretace ortogonalita vlastnosti ortonormálních bázi [1] Definice skalárního součinu Necht L je lineární
Skalární součin axiomatická definice odvození velikosti vektorů a úhlu mezi vektory geometrická interpretace ortogonalita vlastnosti ortonormálních bázi [1] Definice skalárního součinu Necht L je lineární
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES
 VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ FAKULTA STAVEBNÍ Prof. RNDr. Zdeněk Chobola,CSc., Vlasta Juránková,CSc. FYZIKA PRŮVODCE GB01-P03 MECHANIKA TUHÝCH TĚLES STUDIJNÍ OPORY PRO STUDIJNÍ PROGRAMY S KOMBINOVANOU
Matematická analýza III.
 3. Implicitní funkce Miroslav Hušek, Lucie Loukotová UJEP 2010 V této kapitole se seznámíme s dalším možným zadáním funkce jejím implicitním vyjádřením. Doplní tak nám již známé explicitní a parametrické
3. Implicitní funkce Miroslav Hušek, Lucie Loukotová UJEP 2010 V této kapitole se seznámíme s dalším možným zadáním funkce jejím implicitním vyjádřením. Doplní tak nám již známé explicitní a parametrické
3.4.2 Rovnováha Rovnováha u centrální rovinné silové soustavy nastává v případě, že výsledná síla nahrazující soustavu je rovna nule. Tedy. Obr.17.
 Obr.17. F F 1x = F.cos α1,..., Fnx = F. cos 1y = F.sin α1,..., Fny = F. sin α α n n. Původní soustava je nyní nahrazena děma soustavami sil ve směru osy x a ve směru osy y. Tutu soustavu nahradíme dvěma
Obr.17. F F 1x = F.cos α1,..., Fnx = F. cos 1y = F.sin α1,..., Fny = F. sin α α n n. Původní soustava je nyní nahrazena děma soustavami sil ve směru osy x a ve směru osy y. Tutu soustavu nahradíme dvěma
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ
 ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
ANALYTICKÁ GEOMETRIE LINEÁRNÍCH ÚTVARŮ V ROVINĚ Parametrické vyjádření přímky v rovině Máme přímku p v rovině určenou body A, B. Sestrojíme vektor u = B A. Pro bod B tím pádem platí: B = A + u. Je zřejmé,
1. Obyčejné diferenciální rovnice
 & 8..8 8: Josef Hekrdla obyčejné diferenciální rovnice-separace proměnných. Obyčejné diferenciální rovnice Rovnice, ve které je neznámá funkcí a v rovnici se vyskytuje spolu se svými derivacemi, se nazývá
& 8..8 8: Josef Hekrdla obyčejné diferenciální rovnice-separace proměnných. Obyčejné diferenciální rovnice Rovnice, ve které je neznámá funkcí a v rovnici se vyskytuje spolu se svými derivacemi, se nazývá
Báze a dimenze vektorových prostorů
 Báze a dimenze vektorových prostorů Buď (V, +, ) vektorový prostor nad tělesem (T, +, ). Nechť u 1, u 2,..., u n je konečná posloupnost vektorů z V. Existují-li prvky s 1, s 2,..., s n T, z nichž alespoň
Báze a dimenze vektorových prostorů Buď (V, +, ) vektorový prostor nad tělesem (T, +, ). Nechť u 1, u 2,..., u n je konečná posloupnost vektorů z V. Existují-li prvky s 1, s 2,..., s n T, z nichž alespoň
BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY
 BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY ROTAČNÍ POHYB TĚLESA, MOMENT SÍLY, MOMENT SETRVAČNOSTI DYNAMIKA Na rozdíl od kinematiky, která se zabývala
BIOMECHANIKA DYNAMIKA NEWTONOVY POHYBOVÉ ZÁKONY, VNITŘNÍ A VNĚJŠÍ SÍLY ČASOVÝ A DRÁHOVÝ ÚČINEK SÍLY ROTAČNÍ POHYB TĚLESA, MOMENT SÍLY, MOMENT SETRVAČNOSTI DYNAMIKA Na rozdíl od kinematiky, která se zabývala
6. ANALYTICKÁ GEOMETRIE
 Vektorová algebra 6. ANALYTICKÁ GEOMETRIE Pravoúhlé souřadnice bodu v prostoru Poloha bodu v prostoru je vzhledem ke třem osám k sobě kolmým určena třemi souřadnicemi, které tvoří uspořádanou trojici reálných
Vektorová algebra 6. ANALYTICKÁ GEOMETRIE Pravoúhlé souřadnice bodu v prostoru Poloha bodu v prostoru je vzhledem ke třem osám k sobě kolmým určena třemi souřadnicemi, které tvoří uspořádanou trojici reálných
Statika. fn,n+1 F = N n,n+1
 Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
Statika Zkoumá síly a momenty působící na robota v klidu. Uvažuje tíhu jednotlivých ramen a břemene. Uvažuje sílu a moment, kterou působí robot na okolí. Uvažuje konečné tuhosti ramen a kloubů. V našem
Obyčejnými diferenciálními rovnicemi (ODR) budeme nazývat rovnice, ve kterých
 budeme nazývat rovnice, ve kterých") Obyčejné diferenciální rovnice Obyčejnými diferenciálními rovnicemi (ODR) budeme nazývat rovnice, ve kterých se vyskytují derivace neznámé funkce jedné reálné proměnné. Příklad. Bud dána funkce f : R R.
Obyčejné diferenciální rovnice Obyčejnými diferenciálními rovnicemi (ODR) budeme nazývat rovnice, ve kterých se vyskytují derivace neznámé funkce jedné reálné proměnné. Příklad. Bud dána funkce f : R R.
Momenty setrvačnosti a deviační momenty
 Momenty setrvačnosti a deviační momenty Momenty setrvačnosti a deviační momenty charakterizují spolu shmotností a statickými momenty hmoty rozložení hmotnosti tělesa vprostoru. Jako takové se proto vyskytují
Momenty setrvačnosti a deviační momenty Momenty setrvačnosti a deviační momenty charakterizují spolu shmotností a statickými momenty hmoty rozložení hmotnosti tělesa vprostoru. Jako takové se proto vyskytují
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ. Modernizace studijního programu Matematika na PřF Univerzity Palackého v Olomouci CZ.1.07/2.2.00/28.
 INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Modernizace studijního programu Matematika na PřF Univerzity Palackého v Olomouci CZ.1.07/2.2.00/28.0141 Báze vektorových prostorů, transformace souřadnic Michal Botur Přednáška
INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ Modernizace studijního programu Matematika na PřF Univerzity Palackého v Olomouci CZ.1.07/2.2.00/28.0141 Báze vektorových prostorů, transformace souřadnic Michal Botur Přednáška
Slapový vývoj oběžné dráhy. Michaela Káňová, Marie Běhounková Geodynamický seminář
 Slapový vývoj oběžné dráhy Michaela Káňová, Marie Běhounková Geodynamický seminář 20. 5. 2015 Problém dvou těles v nebeské mechanice: dva hmotné body + gravitační síla = Keplerova úloha m keplerovská rychlost
Slapový vývoj oběžné dráhy Michaela Káňová, Marie Běhounková Geodynamický seminář 20. 5. 2015 Problém dvou těles v nebeské mechanice: dva hmotné body + gravitační síla = Keplerova úloha m keplerovská rychlost
Od kvantové mechaniky k chemii
 Od kvantové mechaniky k chemii Jan Řezáč UOCHB AV ČR 19. září 2017 Jan Řezáč (UOCHB AV ČR) Od kvantové mechaniky k chemii 19. září 2017 1 / 33 Úvod Vztah mezi molekulovou strukturou a makroskopickými vlastnostmi
Od kvantové mechaniky k chemii Jan Řezáč UOCHB AV ČR 19. září 2017 Jan Řezáč (UOCHB AV ČR) Od kvantové mechaniky k chemii 19. září 2017 1 / 33 Úvod Vztah mezi molekulovou strukturou a makroskopickými vlastnostmi
Moderní technologie ve studiu aplikované fyziky CZ.1.07/2.2.00/ Množiny, funkce
 Moderní technologie ve studiu aplikované fyziky CZ.1.07/2.2.00/07.0018 2. Množiny, funkce MNOŽIN, ZÁKLDNÍ POJMY Pojem množiny patří v matematice ke stěžejním. Nelze jej zavést ve formě definice pomocí
Moderní technologie ve studiu aplikované fyziky CZ.1.07/2.2.00/07.0018 2. Množiny, funkce MNOŽIN, ZÁKLDNÍ POJMY Pojem množiny patří v matematice ke stěžejním. Nelze jej zavést ve formě definice pomocí
Příklad 1 ŘEŠENÉ PŘÍKLADY Z M1A ČÁST 6
 Příklad 1 Vyšetřete průběh funkce: a) = b) = c) = d) =ln1+ e) =ln f) = Poznámka K vyšetřování průběhu funkce použijeme postup uvedený v zadání. Některé kroky nejsou již tak detailní, všechny by ale měly
Příklad 1 Vyšetřete průběh funkce: a) = b) = c) = d) =ln1+ e) =ln f) = Poznámka K vyšetřování průběhu funkce použijeme postup uvedený v zadání. Některé kroky nejsou již tak detailní, všechny by ale měly
Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru. Kvadratická forma v n proměnných je tak polynom n proměnných s
 Kapitola 13 Kvadratické formy Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru f(x 1,..., x n ) = a ij x i x j, kde koeficienty a ij T. j=i Kvadratická forma v n proměnných
Kapitola 13 Kvadratické formy Definice 13.1 Kvadratická forma v n proměnných s koeficienty z tělesa T je výraz tvaru f(x 1,..., x n ) = a ij x i x j, kde koeficienty a ij T. j=i Kvadratická forma v n proměnných
[1] Motivace. p = {t u ; t R}, A(p) = {A(t u ); t R} = {t A( u ); t R}
![[1] Motivace. p = {t u ; t R}, A(p) = {A(t u ); t R} = {t A( u ); t R}](/thumbs/26/7692117.jpg "[1] Motivace. p = {t u ; t R}, A(p) = {A(t u ); t R} = {t A( u ); t R}") Vlastní číslo, vektor motivace: směr přímky, kterou lin. transformace nezmění invariantní podprostory charakteristický polynom báze, vzhledem ke které je matice transformace nejjednodušší podobnost s diagonální
Vlastní číslo, vektor motivace: směr přímky, kterou lin. transformace nezmění invariantní podprostory charakteristický polynom báze, vzhledem ke které je matice transformace nejjednodušší podobnost s diagonální
příkladů do cvičení. V textu se objeví i pár detailů, které jsem nestihl (na které jsem zapomněl) a(b u) = (ab) u, u + ( u) = 0 = ( u) + u.
 a(b u) = (ab) u, u + ( u) = 0 = ( u) + u.") Několik řešených příkladů do Matematiky Vektory V tomto textu je spočteno několik ukázkových příkladů které vám snad pomohou při řešení příkladů do cvičení. V textu se objeví i pár detailů které jsem nestihl
Několik řešených příkladů do Matematiky Vektory V tomto textu je spočteno několik ukázkových příkladů které vám snad pomohou při řešení příkladů do cvičení. V textu se objeví i pár detailů které jsem nestihl
Univerzita Karlova v Praze Matematicko-fyzikální fakulta. Marek Basovník. Ústav teoretické fyziky. Studijní program: Obecná fyzika
 Univerzita Karlova v Praze Matematicko-fyzikální fakulta BAKALÁŘSKÁ PRÁCE Marek Basovník Prostoročas uvnitř černých děr Ústav teoretické fyziky Vedoucí bakalářské práce: Doc. RNDr. Oldřich Semerák, Dr.
Univerzita Karlova v Praze Matematicko-fyzikální fakulta BAKALÁŘSKÁ PRÁCE Marek Basovník Prostoročas uvnitř černých děr Ústav teoretické fyziky Vedoucí bakalářské práce: Doc. RNDr. Oldřich Semerák, Dr.
Drsná matematika III 1. přednáška Funkce více proměnných: křivky, směrové derivace, diferenciál
 Drsná matematika III 1. přednáška Funkce více proměnných: křivky, směrové derivace, diferenciál Jan Slovák Masarykova univerzita Fakulta informatiky 16. 9. 2008 Obsah přednášky 1 Literatura 2 Funkce a
Drsná matematika III 1. přednáška Funkce více proměnných: křivky, směrové derivace, diferenciál Jan Slovák Masarykova univerzita Fakulta informatiky 16. 9. 2008 Obsah přednášky 1 Literatura 2 Funkce a
Přednášky z předmětu Aplikovaná matematika, rok 2012
 Přednášky z předmětu Aplikovaná matematika, rok 2012 Robert Mařík 23. ledna 2015 2 Obsah 1 Přednášky 2012 5 2 Písemky 2012 9 3 4 OBSAH Kapitola 1 Přednášky 2012 1. prednaska, 16.2.2012 -----------------------
Přednášky z předmětu Aplikovaná matematika, rok 2012 Robert Mařík 23. ledna 2015 2 Obsah 1 Přednášky 2012 5 2 Písemky 2012 9 3 4 OBSAH Kapitola 1 Přednášky 2012 1. prednaska, 16.2.2012 -----------------------
Vzpěr jednoduchého rámu, diferenciální operátory. Lenka Dohnalová
 1 / 40 Vzpěr jednoduchého rámu, diferenciální operátory Lenka Dohnalová ČVUT, fakulta stavební, ZS 2015/2016 katedra stavební mechaniky a katedra matematiky, Odborné vedení: doc. Ing. Jan Zeman, Ph.D.,
1 / 40 Vzpěr jednoduchého rámu, diferenciální operátory Lenka Dohnalová ČVUT, fakulta stavební, ZS 2015/2016 katedra stavební mechaniky a katedra matematiky, Odborné vedení: doc. Ing. Jan Zeman, Ph.D.,
KOMPLEXNÍ ČÍSLA INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
 KOMPLEXNÍ ČÍSLA Gymnázium Jiřího Wolkera v Prostějově Výukové materiály z matematiky pro vyšší gymnázia Autoři projektu Student na prahu 21. století - využití ICT ve vyučování matematiky na gymnáziu INVESTICE
KOMPLEXNÍ ČÍSLA Gymnázium Jiřího Wolkera v Prostějově Výukové materiály z matematiky pro vyšší gymnázia Autoři projektu Student na prahu 21. století - využití ICT ve vyučování matematiky na gymnáziu INVESTICE
Teorie informace a kódování (KMI/TIK) Reed-Mullerovy kódy
 Reed-Mullerovy kódy") Teorie informace a kódování (KMI/TIK) Reed-Mullerovy kódy Lukáš Havrlant Univerzita Palackého 10. ledna 2014 Primární zdroj Jiří Adámek: Foundations of Coding. Strany 137 160. Na webu ke stažení, heslo:
Teorie informace a kódování (KMI/TIK) Reed-Mullerovy kódy Lukáš Havrlant Univerzita Palackého 10. ledna 2014 Primární zdroj Jiří Adámek: Foundations of Coding. Strany 137 160. Na webu ke stažení, heslo:
České vysoké učení technické v Praze Fakulta biomedicínského inženýrství
 České vysoké učení technické v Praze Fakulta biomedicínského inženýrství Úloha KA03/č. 5: Měření kinematiky a dynamiky pohybu osoby v prostoru pomocí ultrazvukového radaru Ing. Patrik Kutílek, Ph.., Ing.
České vysoké učení technické v Praze Fakulta biomedicínského inženýrství Úloha KA03/č. 5: Měření kinematiky a dynamiky pohybu osoby v prostoru pomocí ultrazvukového radaru Ing. Patrik Kutílek, Ph.., Ing.
Diferenciální rovnice a jejich aplikace. (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36
 Diferenciální rovnice a jejich aplikace 1 / 36") Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
Vibrace atomů v mřížce, tepelná kapacita pevných látek
 Vibrace atomů v mřížce, tepelná kapacita pevných látek Atomy vázané v mřížce nejsou v klidu. Míru jejich pohybu vyjadřuje podobně jako u plynů a kapalin teplota. - Elastické vlny v kontinuu neatomární
Vibrace atomů v mřížce, tepelná kapacita pevných látek Atomy vázané v mřížce nejsou v klidu. Míru jejich pohybu vyjadřuje podobně jako u plynů a kapalin teplota. - Elastické vlny v kontinuu neatomární
Vlastní čísla a vlastní vektory
 Vlastní čísla a vlastní vektory 1 Motivace Uvažujme lineární prostor všech vázaných vektorů v rovině, které procházejí počátkem, a lineární zobrazení tohoto prostoru do sebe(lineární transformaci, endomorfismus)
Vlastní čísla a vlastní vektory 1 Motivace Uvažujme lineární prostor všech vázaných vektorů v rovině, které procházejí počátkem, a lineární zobrazení tohoto prostoru do sebe(lineární transformaci, endomorfismus)
Substituce ve vícenásobném integrálu verze 1.1
 Úvod Substituce ve vícenásobném integrálu verze. Následující text popisuje výpočet vícenásobných integrálů pomocí věty o substituci. ěl by sloužit především studentům předmětu ATEAT k přípravě na zkoušku.
Úvod Substituce ve vícenásobném integrálu verze. Následující text popisuje výpočet vícenásobných integrálů pomocí věty o substituci. ěl by sloužit především studentům předmětu ATEAT k přípravě na zkoušku.
Netradiční výklad tradičních témat
 Netradiční výklad tradičních témat J. Musilová, P. Musilová: Matematika pro porozumění i praxi I. VUTIUM, Brno 2006 (291 s.), 2009 (349 s.). J. Musilová, P. Musilová: Matematika pro porozumění i praxi
Netradiční výklad tradičních témat J. Musilová, P. Musilová: Matematika pro porozumění i praxi I. VUTIUM, Brno 2006 (291 s.), 2009 (349 s.). J. Musilová, P. Musilová: Matematika pro porozumění i praxi
Matematika pro informatiky
 (FIT ČVUT v Praze) Konvexní analýza 13.týden 1 / 1 Matematika pro informatiky Jaroslav Milota Fakulta informačních technologíı České vysoké učení technické v Praze Letní semestr 2010/11 Extrémy funkce
(FIT ČVUT v Praze) Konvexní analýza 13.týden 1 / 1 Matematika pro informatiky Jaroslav Milota Fakulta informačních technologíı České vysoké učení technické v Praze Letní semestr 2010/11 Extrémy funkce
Funkce dvou a více proměnných
 Funkce dvou a více proměnných. Motivace V praxi nevstačíme s funkcemi jedné proměnné, většina veličin závisí více než na jedné okolnosti, např.: obsah obdélníka: S( ) kinetická energie: Ek = = x mv ekonomika:
Funkce dvou a více proměnných. Motivace V praxi nevstačíme s funkcemi jedné proměnné, většina veličin závisí více než na jedné okolnosti, např.: obsah obdélníka: S( ) kinetická energie: Ek = = x mv ekonomika:
Příklad 1: Komutační relace [d/dx, x] Příklad 2: Operátor B = i d/dx
![Příklad 1: Komutační relace [d/dx, x] Příklad 2: Operátor B = i d/dx](/thumbs/91/106542832.jpg "Příklad 1: Komutační relace [d/dx, x] Příklad 2: Operátor B = i d/dx") 1 Příklad 1: Komutační relace [d/, x] Mějme na dva operátory: ˆ d/ a ˆ 5 D X x, například na prvek x působí takto Určeme jejich komutátor ˆ 5 d 5 4 ˆ 5 5 6 D x x 5 x, X x xx x ˆ ˆ ˆ ˆ ˆ ˆ d d [ DX, ] f
1 Příklad 1: Komutační relace [d/, x] Mějme na dva operátory: ˆ d/ a ˆ 5 D X x, například na prvek x působí takto Určeme jejich komutátor ˆ 5 d 5 4 ˆ 5 5 6 D x x 5 x, X x xx x ˆ ˆ ˆ ˆ ˆ ˆ d d [ DX, ] f