Matematika 4 FSV UK, LS Miroslav Zelený
|
|
|
- Sabina Fišerová
- před 6 lety
- Počet zobrazení:
Transkript
1 Matematika 4 FSV UK, LS Miroslav Zelený
2 13. Diferenční rovnice 14. Diferenciální rovnice se separovanými prom. 15. Lineární diferenciální rovnice prvního řádu 16. Lineární diferenciální rovnice n-tého řádu 17. Soustavy diferenciálních rovnic
3 13. Diferenční rovnice

4 Leonardo Fibonacci (asi )
5 Definice Necht k N. Lineární diferenční rovnicí k-tého řádu s konstantními koeficienty budeme rozumět rovnici y(n + k) + p 1 y(n + k 1) + + p k y(n) = a n, n N, (13.1) kde neznámou je posloupnost {y(n)} n=1, přičemž p 1,..., p k R, p k 0 jsou dána, stejně jako posloupnost {a n } n=1.
6 Definice Necht k N. Lineární diferenční rovnicí k-tého řádu s konstantními koeficienty budeme rozumět rovnici y(n + k) + p 1 y(n + k 1) + + p k y(n) = a n, n N, (13.1) kde neznámou je posloupnost {y(n)} n=1, přičemž p 1,..., p k R, p k 0 jsou dána, stejně jako posloupnost {a n } n=1. Řešením rovnice (13.1) rozumíme každou posloupnost {y(n)} n=1 splňující (1) pro každé n N. Pokud chceme, aby řešení rovnice (13.1) splňovalo podmínky y(1) = y 1,..., y(k) = y k, (13.2) kde y 1,..., y k jsou dána (tzv. počáteční podmínky), pak hovoříme o počáteční úloze.
7 Pokud a n = 0 pro každé n N, pak (13.1)) má tvar y(n + k) + p 1 y(n + k 1) + + p k y(n) = 0, n N. (13.3) Tato rovnice se nazývá homogenní.
8 Věta 13.1 Počáteční úloha (13.1), (13.2) má právě jedno řešení.
9 Věta 13.1 Počáteční úloha (13.1), (13.2) má právě jedno řešení. Věta 13.2 Množina řešení rovnice (13.3) tvoří vektorový podprostor dimenze k prostoru všech reálných posloupností.
10 Věta 13.1 Počáteční úloha (13.1), (13.2) má právě jedno řešení. Věta 13.2 Množina řešení rovnice (13.3) tvoří vektorový podprostor dimenze k prostoru všech reálných posloupností. Definice Charakteristickým polynomem rovnice (13.1) budeme rozumět polynom λ λ k + p 1 λ k p k 1 λ + p k.
11 Věta 13.3 Necht λ 1,..., λ s jsou všechny navzájem různé reálné kořeny charakteristického polynomu rovnice (13.1) s násobnostmi r 1,..., r s. Necht ξ 1,..., ξ l jsou všechny navzájem různé komplexní kořeny charakteristického polynomu rovnice (13.1) s kladnou imaginární částí a násobnostmi q 1,..., q l, přičemž pro j = 1,..., l platí ξ j = µ j (cos ν j + i sin ν j ). Pak následující posloupnosti tvoří bázi prostoru řešení (3).
12 {λ n 1 }, {nλn 1 },... {nr 1 1 λ n 1 },. {λ n s}, {nλ n s},... {n rs 1 λ n s}, {µ n 1 cos ν 1n}, {nµ n 1 cos ν 1n},... {n q 1 1 µ n 1 cos ν 1n}, {µ n 1 sin ν 1n}, {nµ n 1 sin ν 1n},... {n q 1 1 µ n 1 sin ν 1n},. {µ n l cos ν l n}, {nµ n l cos ν l n},... {n q l 1 µ n l cos ν l n}, {µ n l sin ν l n}, {nµ n l sin ν l n},... {n q l 1 µ n l sin ν l n}
13 Věta 13.4 Necht posloupnosti {y 1 (n)} n=1, {y 2 (n)} n=1,..., {y k (n)} n=1 tvoří fundamentální systém řešení (13.3). Necht posloupnost {z(n)} n=1 je řešením (13.1). Potom posloupnost {y(n)} n=1 řeší (13.1), právě když existují konstanty c 1,..., c k R takové, že y(n) = z(n) + c 1 y 1 (n) + + c k y k (n) pro každé n N.
14 Věta 13.5 Necht posloupnost {a n } n=1 v rovnici (13.1) splňuje a n = α n( P(n) cos(νn) + Q(n) sin(νn) ), kde α > 0, P, Q jsou polynomy. Pak existuje řešení (13.1) ve tvaru y(n) = α n n m( R(n) cos(νn) + S(n) sin(νn) ), kde R, S jsou vhodné polynomy stupně ne většího než max{stupeň P, stupeň Q} a m N {0} udává jakou násobnost má číslo α(cos ν + i sin ν) jakožto kořen charakteristického polynomu rovnice (13.1).
15 14. Diferenciální rovnice se separovanými proměnnými
16 Fyzika Volný pád bez odporu vzduchu: ma = mg v = g
17 Fyzika Volný pád bez odporu vzduchu: ma = mg v = g Volný pád s odporem vzduchu: mv = mg bv mv = mg bv 2
18 Demografie Malthusův populační model p = ap
19 Demografie Malthusův populační model p = ap
20 Biologie Logistický populační model p = ap bp 2
21 Biologie Logistický populační model p = ap bp 2
22 Biologie
23 Biologie Trepka velká (paramecium caudatum)
24 Biologie Trepka velká (paramecium caudatum) prvoci nálevnící chudoblanní

25 Biologie Trepka velká (paramecium caudatum) prvoci nálevnící chudoblanní p = ap bp 2, a = 2.309, b = a/375
26 Ekonomie Q d... poptávka
27 Ekonomie Q d... poptávka Q s... nabídka
28 Ekonomie Q d... poptávka Q s... nabídka P... cena
29 Ekonomie Q d... poptávka Q s... nabídka P... cena Q d = α βp + mp + np
30 Ekonomie Q d... poptávka Q s... nabídka P... cena Q d = α βp + mp + np Q s = γ + δp + up + vp
31 Ekonomie Q d... poptávka Q s... nabídka P... cena Q d = α βp + mp + np Q s = γ + δp + up + vp Q d = Q s
32 Definice Diferenciální rovnicí rozumíme rovnici tvaru F(y (n), y (n 1),..., y, y, y, x) = 0, (14.1) kde F je reálná funkce n + 2 proměnných.
33 Definice Řešením diferenciální rovnice (14.1) rozumíme funkci y definovanou na nějakém neprázdném otevřeném intervalu I, která má v každém bodě intervalu I vlastní n-tou derivaci a jejíž hodnoty spolu s hodnotami derivací splňují rovnici (14.1) v každém bodě intervalu I, tj. pro každé x I platí F(y (n) (x), y (n 1) (x),..., y (x), y (x), y(x), x) = 0.
34 Definice Řešením diferenciální rovnice (14.1) rozumíme funkci y definovanou na nějakém neprázdném otevřeném intervalu I, která má v každém bodě intervalu I vlastní n-tou derivaci a jejíž hodnoty spolu s hodnotami derivací splňují rovnici (14.1) v každém bodě intervalu I, tj. pro každé x I platí F(y (n) (x), y (n 1) (x),..., y (x), y (x), y(x), x) = 0. Řešení y diferenciální rovnice (14.1) je maximální, pokud neexistuje takové řešení z, pro které D y D z a které se na D y shoduje s y.
35 Definice Rovnice se separovanými proměnnými je rovnice tvaru y = g(y) h(x). (14.2)
36 Metoda řešení pro spojité g a h 1. Určíme maximální otevřené intervaly obsažené v definičním oboru funkce h.
37 Metoda řešení pro spojité g a h 1. Určíme maximální otevřené intervaly obsažené v definičním oboru funkce h. 2. Najdeme všechny nulové body funkce g. Je-li totiž g(c) = 0, pak na každém intervalu z 1. kroku je funkce y(x) = c řešením rovnice (14.2). Těmto řešením říkáme singulární nebo také stacionární.
38 Metoda řešení pro spojité g a h 1. Určíme maximální otevřené intervaly obsažené v definičním oboru funkce h. 2. Najdeme všechny nulové body funkce g. Je-li totiž g(c) = 0, pak na každém intervalu z 1. kroku je funkce y(x) = c řešením rovnice (14.2). Těmto řešením říkáme singulární nebo také stacionární. 3. Určíme maximální otevřené intervaly, na kterých je funkce g nenulová.
39 4. Vezmeme interval I z 1. kroku a interval J z 3. kroku.
40 4. Vezmeme interval I z 1. kroku a interval J z 3. kroku. Tedy h je na I spojitá a g je spojitá a nenulová na J.
41 4. Vezmeme interval I z 1. kroku a interval J z 3. kroku. Tedy h je na I spojitá a g je spojitá a nenulová na J. Budeme hledat řešení, která jsou definovaná někde v intervalu I a mají hodnoty v intervalu J.
42 4. Vezmeme interval I z 1. kroku a interval J z 3. kroku. Tedy h je na I spojitá a g je spojitá a nenulová na J. Budeme hledat řešení, která jsou definovaná někde v intervalu I a mají hodnoty v intervalu J. Je-li y(x) takové řešení, pak pro něj platí y (x) g(y(x)) = h(x).
43 4. Vezmeme interval I z 1. kroku a interval J z 3. kroku. Tedy h je na I spojitá a g je spojitá a nenulová na J. Budeme hledat řešení, která jsou definovaná někde v intervalu I a mají hodnoty v intervalu J. Je-li y(x) takové řešení, pak pro něj platí y (x) g(y(x)) = h(x). Necht H je primitivní funkce k h na intervalu I a G je primitivní funkce k funkci 1/g na J.
44 4. Vezmeme interval I z 1. kroku a interval J z 3. kroku. Tedy h je na I spojitá a g je spojitá a nenulová na J. Budeme hledat řešení, která jsou definovaná někde v intervalu I a mají hodnoty v intervalu J. Je-li y(x) takové řešení, pak pro něj platí y (x) g(y(x)) = h(x). Necht H je primitivní funkce k h na intervalu I a G je primitivní funkce k funkci 1/g na J. Existuje konstanta c R taková, že platí G(y(x)) = H(x) + c na definičním oboru řešení y, který nalezneme v následujícím kroku.
45 5. Nyní zafixujeme c a nalezneme maximální neprázdné otevřené intervaly obsažené v množině {x I; H(x) + c G(J)}.
46 5. Nyní zafixujeme c a nalezneme maximální neprázdné otevřené intervaly obsažené v množině {x I; H(x) + c G(J)}. Na každém z těchto intervalů musí mít řešení tvar y(x) = G 1 (H(x) + c), kde G 1 značí funkci inverzní k funkci G. Ta existuje, nebot G je na intervalu J bud rostoucí nebo klesající.
47 6. Z řešení nalezených v 5. kroku a singulárních řešení z 2. kroku slepíme všechna maximální řešení.
48 6. Z řešení nalezených v 5. kroku a singulárních řešení z 2. kroku slepíme všechna maximální řešení. Necht y 1 a y 2 jsou řešení rovnice (14.2), první na intervalu (a, b) a druhé na intervalu (b, c), přičemž b D h.
49 6. Z řešení nalezených v 5. kroku a singulárních řešení z 2. kroku slepíme všechna maximální řešení. Necht y 1 a y 2 jsou řešení rovnice (14.2), první na intervalu (a, b) a druhé na intervalu (b, c), přičemž b D h. Předpokládejme, že lim x b y 1(x) = lim x b+ y 2 (x) = α D g
50 6. Z řešení nalezených v 5. kroku a singulárních řešení z 2. kroku slepíme všechna maximální řešení. Necht y 1 a y 2 jsou řešení rovnice (14.2), první na intervalu (a, b) a druhé na intervalu (b, c), přičemž b D h. Předpokládejme, že lim y 1(x) = lim y 2 (x) = α D g x b x b+ Pak funkce y 1 (x), x (a, b); y(x) = α, x = b; y 2 (x), x (b, c); je řešením rovnice (14.2) na intervalu (a, c).
51 Malthusiánský populační model p = a p,
52 Malthusiánský populační model p = a p, p(t) = p(0) e at
53 Malthusiánský populační model p = a p, p(t) = p(0) e at
54 Logistický populační model p = ap bp 2, a, b (0, + ),
55 Logistický populační model p = ap bp 2, a, b (0, + ), p(t) = akeat bke at + 1
56 Logistický populační model p = ap bp 2, a, b (0, + ), p(t) = akeat bke at + 1
57 Porovnání malthusiánského a logistického modelu
58 Autonomní rovnice jsou rovnice tvaru y = g(y). (14.3)
59 Autonomní rovnice jsou rovnice tvaru y = g(y). (14.3) Věta 14.1 Každé řešení rovnice (14.3) je monotónní.
60 Integrál b 1 a g integrály c a konverguje, konvergují tedy i oba 1 a b g c 1. V tom případě je řešení g s hodnotami v intervalu (a, b) definované na omezeném intervalu (A, B).
61 Integrál b 1 a g integrály c a konverguje, konvergují tedy i oba 1 a b g c 1. V tom případě je řešení g s hodnotami v intervalu (a, b) definované na omezeném intervalu (A, B). Integrál c a 1 konverguje, integrál b 1 diverguje. g c g V tom případě je řešení s hodnotami v (a, b) definované na intervalu (A, + ), A R.
62 Integrál b 1 a g integrály c a konverguje, konvergují tedy i oba 1 a b g c 1. V tom případě je řešení g s hodnotami v intervalu (a, b) definované na omezeném intervalu (A, B). Integrál c a 1 konverguje, integrál b 1 diverguje. g c g V tom případě je řešení s hodnotami v (a, b) definované na intervalu (A, + ), A R. Integrál c a 1 diverguje, integrál b 1 konverguje. g c g V tom případě je řešení s hodnotami v (a, b) definované na intervalu (, B), B R.
63 Integrál b 1 a g integrály c a konverguje, konvergují tedy i oba 1 a b g c 1. V tom případě je řešení g s hodnotami v intervalu (a, b) definované na omezeném intervalu (A, B). Integrál c a 1 konverguje, integrál b 1 diverguje. g c g V tom případě je řešení s hodnotami v (a, b) definované na intervalu (A, + ), A R. Integrál c a 1 diverguje, integrál b 1 konverguje. g c g V tom případě je řešení s hodnotami v (a, b) definované na intervalu (, B), B R. Oba integrály c 1, b 1 divergují. V tom případě je a g c g řešení s hodnotami v intervalu (a, b) definované na celém R.
64 Lemma 14.2 Necht a, b R, a < b, funkce g je spojitá a kladná na a, b) a má v bodě b zleva kladnou limitu. Pak b 1 a g konverguje.
65 Lemma 14.2 Necht a, b R, a < b, funkce g je spojitá a kladná na a, b) a má v bodě b zleva kladnou limitu. Pak b 1 a g konverguje. Lemma 14.3 Necht funkce g je spojitá na a, b, kladná na a, b), g(b) = 0 a g (b) existuje vlastní. Pak b 1 diverguje. a g
66 15. Lineární diferenciální rovnice 1. řádu
67 Budeme se zabývat rovnicemi tvaru y + p(x)y = q(x), (15.1) kde p, q jsou spojité funkce na daném intervalu (a, b), a, b R, a < b (lineární diferenciální rovnice prvního řádu).
68 Budeme se zabývat rovnicemi tvaru y + p(x)y = q(x), (15.1) kde p, q jsou spojité funkce na daném intervalu (a, b), a, b R, a < b (lineární diferenciální rovnice prvního řádu). Homogenní diferenciální rovnicí budeme rozumět rovnici tvaru y + p(x)y = 0. (15.2)
69 Věta 15.1 Maximální řešení rovnice (15.1) splňující podmínku y(x 0 ) = y 0, kde x 0 (a, b), y 0 R, má tvar ( x ) y(x) = q(t)e P(t) dt e P(x) + y 0 e P(x), x 0 x (a, b), kde P je primitivní funkce k p na (a, b) splňující P(x 0 ) = 0.
70 16. Lineární diferenciální rovnice n-tého řádu s konstantními koeficienty
71 Budeme se zabývat rovnicemi tvaru y (n) + a n 1 y (n 1) + + a 1 y + a 0 y = f (t), (16.1) kde n N, a 0,..., a n 1 jsou reálná čísla a f je funkce spojitá na daném intervalu (a, b)
72 Budeme se zabývat rovnicemi tvaru y (n) + a n 1 y (n 1) + + a 1 y + a 0 y = f (t), (16.1) kde n N, a 0,..., a n 1 jsou reálná čísla a f je funkce spojitá na daném intervalu (a, b) (lineární diferenciální rovnice n-tého řádu s konstantními koeficienty).
73 Budeme se zabývat rovnicemi tvaru y (n) + a n 1 y (n 1) + + a 1 y + a 0 y = f (t), (16.1) kde n N, a 0,..., a n 1 jsou reálná čísla a f je funkce spojitá na daném intervalu (a, b) (lineární diferenciální rovnice n-tého řádu s konstantními koeficienty). Homogenní rovnicí k rovnici (16.1) rozumíme rovnici y (n) + a n 1 y (n 1) + + a 1 y + a 0 y = 0. (16.2)
74 Věta 16.1 Necht t 0 (a, b) a z 0,..., z n 1 R. Pak existuje právě jedno maximální řešení y rovnice (16.1), které splňuje podmínky y(t 0 ) = z 0, y (t 0 ) = z 1,..., y (n 1) (t 0 ) = z n 1. Toto řešení je navíc definováno na celém intervalu (a, b).
75 Věta 16.2 (i) Maximální řešení rovnice (16.2) jsou definována na celém R a tvoří vektorový podprostor prostoru C n (R) dimenze n.
76 Věta 16.2 (i) Maximální řešení rovnice (16.2) jsou definována na celém R a tvoří vektorový podprostor prostoru C n (R) dimenze n. (ii) Necht y p je maximální řešení rovnice (16.1). Pak funkce y je maximálním řešením (16.1), právě když ji lze zapsat ve tvaru y = y p + y h, kde y h je vhodné řešení rovnice (16.2). Definice Bázi prostoru řešenívrovnice (16.2) nazýváme fundamentální systém.
77 Definice Charakteristickým polynomem rovnice (16.2) rozumíme polynom χ(λ) = λ n + a n 1 λ n a 1 λ + a 0.
78 Věta 16.3 (tvar fundamentálního systému) Necht χ je charakteristický polynom rovnice (16.2). Necht λ 1,..., λ s jsou všechny navzájem různé reálné kořeny polynomu χ s násobnostmi r 1,..., r s. Necht α 1 + β 1 i,..., α l + β l i jsou všechny navzájem různé kořeny polynomu χ s kladnou imaginární částí a násobnostmi q 1,..., q l, kde α 1,..., α l, β 1,..., β l R.
79 Pak následující funkce tvoří fundamentální systém řešení rovnice (16.2): e λ 1t, te λ 1t,... t r 1 1 e λ 1t,... e λst, te λst,... t rs 1 e λst, e α1t cos β 1 t, te α1t cos β 1 t,... t q1 1 e α1t cos β 1 t, e α1t sin β 1 t, te α1t sin β 1 t,... t q1 1 e α1t sin β 1 t,... e α l t cos β l t, te α l t cos β l t,... t q l 1 e α l t cos β l t, e α l t sin β l t, te α l t sin β l t,... t q l 1 e α l t sin β l t.
80 Lemma 16.4 Necht y 1,..., y n tvoří fundamentální systém rovnice (16.2). Potom matice y 1 (t) y 2 (t)... y n (t) y 1 U(t) = (t) y 2 (t)... y n(t) y (n 1) 1 (t) y (n 1) 2 (t)... y (n 1) n (t) je regulární pro každé t R.
81 Věta 16.5 Necht f (t) = e µt (P(t) cos νt + Q(t) sin νt), kde µ, ν R a P, Q jsou polynomy. Pak existuje řešení rovnice (16.1) ve tvaru y 0 (t) = t m e µt (R(t) cos νt + S(t) sin νt), kde R, S jsou vhodné polynomy stupně ne většího než max{stupeň P, stupeň Q} a m N {0} udává, jakou násobnost má číslo µ + iν jakožto kořen charakteristického polynomu.
82 17. Soustavy diferenciálních rovnic
83 17.1 Základní pojmy Uvažujme soustavu diferenciálních rovnic ve tvaru x 1 = f 1 (t, x 1, x 2,..., x n ), x 2 = f 2 (t, x 1, x 2,..., x n ),. x n = f n (t, x 1, x 2,..., x n ), (17.1) kde f i, i = 1,..., n, jsou dané funkce definované na jisté neprázdné otevřené podmnožině G R R n.
84 Vektorový tvar: x (t) = f (t, x(t)), kde máme x(t) = [x 1 (t),..., x n (t)], x (t) = [x 1 (t),..., x n(t)] a dále f = [f 1,..., f n ].
85 Definice Řešením soustavy (17.1) rozumíme vektorovou funkci x = [x 1,..., x n ] definovanou na otevřeném neprázdném intervalu J R s hodnotami v R n takovou, že pro každé t J existují vlastní derivace x i (t), i = 1,..., n, a platí (17.1).
86 Definice Řešením soustavy (17.1) rozumíme vektorovou funkci x = [x 1,..., x n ] definovanou na otevřeném neprázdném intervalu J R s hodnotami v R n takovou, že pro každé t J existují vlastní derivace x i (t), i = 1,..., n, a platí (17.1). Počáteční úlohou pro (17.1) rozumíme úlohu, kdy hledáme řešení x soustavy (17.1) splňující navíc předem zadanou podmínku x(t 0 ) = x 0, kde [t 0, x 0 ] G (tzv. počáteční podmínka).
87 Maximální řešení soustavy (17.1) je takové řešení x definované na intervalu J, které již nelze prodloužit, tj. je-li y řešení definované na intervalu I, J I a y(t) = x(t) pro každé t J, pak J = I.
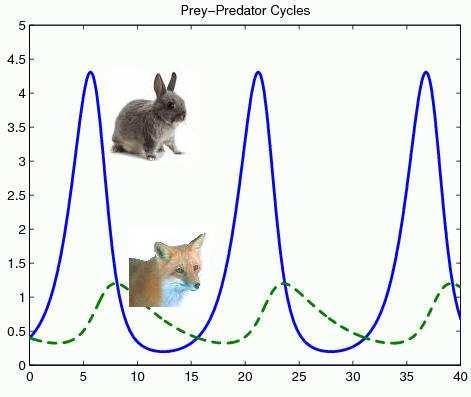
88 Model dravec-kořist
89 Model dravec-kořist Lotka-Volterra Model y x
90 Model dravec-kořist Lotka-Volterra Model y x
91 Model dravec-kořist Lotka-Volterra Model y x
92 Věta 17.1 (Peano) Necht G R R n je otevřená neprázdná množina, f : G R n je spojitá na G. Pak pro každé [t 0, x 0 ] G existuje maximální řešení rovnice (17.1) splňující x(t 0 ) = x 0.
93 Věta 17.2 (Picard) Necht G R R n je otevřená neprázdná množina, f : G R n splňuje podmínku: (P) Pro každé i {1,..., n} platí, že f i je spojitá na G a její parciální derivace podle druhé, třetí,..., (n + 1)-ní proměnné jsou spojité na G. Jestliže [t 0, x 0 ] G, potom existuje právě jedno maximální řešení rovnice (17.1) splňující x(t 0 ) = x 0.
94 17.3 Vlastnosti maximálních řešení Lemma 17.3 Necht a, b R, a < b, a funkce g je definována na (a, b). Jestliže g splňuje Bolzanovu-Cauchyovu podmínku: ε R, ε > 0 δ R, δ > 0 s, t P (b, δ): g(t) g(s) < ε, pak existuje vlastní lim t b g(t).
95 Věta 17.4 (opouštění kompaktu) Necht G R R n je otevřená, K G je kompaktní, zobrazení f je spojité na G, x je maximální řešení rovnice (17.1) definované na intervalu (α, β), t 0 (α, β) a [t 0, x(t 0 )] K. Pak existují τ 1 (α, t 0 ) a τ 2 (t 0, β) taková, že [τ i, x(τ i )] / K, i = 1, 2.
96 Lemma 17.5 Necht G R R n je otevřená, f : G R n je spojité zobrazení, (α, β) R, t 0 (α, β), [t 0, x 0 ] G. Necht vektorová funkce x : (α, β) R n je řešením rovnice (17.1) s počáteční podmínkou x(t 0 ) = x 0. Pak pro každé t (α, β) platí x(t) = x 0 + t t 0 f (s, x(s)) ds.
97 Lemma 17.6 (Gronwall) Necht funkce u je spojitá a nezáporná na intervalu t 0, t 1 ), t 0 R, t 1 R. Necht existují čísla a 0, α > 0, β 0 taková, že u(t) a + t t 0 (αu(s) + β) ds, t t 0, t 1 ). Pak u(t) ( a + β ) e α(t t0), t t 0, t 1 ). α
98 Lemma 17.7 Necht funkce x : a, b R n je spojitá a G R n+1 je otevřená množina. Necht platí {[t, x(t)] R R n ; t a, b } G. Potom existuje ξ > 0 takové, že {[t, z] R R n ; t a, b, x(t) z ξ} G.
99 Lemma 17.8 Necht x : a, b R n je spojité. Potom platí b a b x(t) dt n x(t) dt. a
100 Lemma 17.9 Necht G R n je neprázdná a otevřená a g C 1 (G, R m ). Necht dále C G je konvexní a předpokládejme, že existuje M R, M > 0, takové, že i {1,..., m} j {1,..., n} x C : g i (x) M. x j Potom pro každé dva body u, v C platí kde L = n mm. g(u) g(v) L u v,
101 Věta (spojitá závislost na počátečních podmínkách) Necht G R R n je otevřená a f splňuje podmínku (P) na G.
102 Věta (spojitá závislost na počátečních podmínkách) Necht G R R n je otevřená a f splňuje podmínku (P) na G. Necht x je maximální řešení soustavy (17.1) definované na (α, β) a t 0 (α, β).
103 Věta (spojitá závislost na počátečních podmínkách) Necht G R R n je otevřená a f splňuje podmínku (P) na G. Necht x je maximální řešení soustavy (17.1) definované na (α, β) a t 0 (α, β). Pak pro každé τ 1 (α, t 0 ), τ 2 (t 0, β) a každé ε > 0 existuje δ > 0 takové, že pro každé maximální řešení y, které splňuje podmínku y(t 0 ) x(t 0 ) < δ, platí:
104 Věta (spojitá závislost na počátečních podmínkách) Necht G R R n je otevřená a f splňuje podmínku (P) na G. Necht x je maximální řešení soustavy (17.1) definované na (α, β) a t 0 (α, β). Pak pro každé τ 1 (α, t 0 ), τ 2 (t 0, β) a každé ε > 0 existuje δ > 0 takové, že pro každé maximální řešení y, které splňuje podmínku y(t 0 ) x(t 0 ) < δ, platí: y je definováno v každém bodě intervalu τ 1, τ 2,
105 Věta (spojitá závislost na počátečních podmínkách) Necht G R R n je otevřená a f splňuje podmínku (P) na G. Necht x je maximální řešení soustavy (17.1) definované na (α, β) a t 0 (α, β). Pak pro každé τ 1 (α, t 0 ), τ 2 (t 0, β) a každé ε > 0 existuje δ > 0 takové, že pro každé maximální řešení y, které splňuje podmínku y(t 0 ) x(t 0 ) < δ, platí: y je definováno v každém bodě intervalu τ 1, τ 2, t τ 1, τ 2 : x(t) y(t) < ε.
106
107 Lorenzův model
108 17.3 Soustavy lineárních dif. rovnic Uvažujme soustavu diferenciálních rovnic ve tvaru x 1 = a 11 (t)x a 1n (t)x n + b 1 (t), x 2 = a 21 (t)x a 2n (t)x n + b 2 (t),. x n = a n1 (t)x a nn (t)x n + b n (t), (17.2) kde n N, a ij : (α, β) R, b i : (α, β) R, i, j {1,..., n}, jsou spojité funkce.
109 Vektorový tvar: x = A(t)x + b(t), kde a 11 (t)... a 1n (t) a 21 (t)... a 2n (t) b 1 (t) A(t) =....., b(t) =.. b a n1 (t)... a nn (t) n (t)
110 Věta (o existenci a jednoznačnosti řešení) Necht α, β R, α < β, t 0 (α, β) a x 0 R n. Necht A: (α, β) M(n n), b : (α, β) R n jsou spojitá zobrazení. Potom existuje právě jedno maximální řešení x soustavy (17.2) splňující x(t 0 ) = x 0. Toto řešení je definováno na celém intervalu (α, β).
111 Definice Homogenní soustavou k (17.2) rozumíme soustavu x = A(t)x. (17.3)
112 Věta Necht n N, α, β R, α < β, a A: (α, β) M(n n) je spojité zobrazení. Potom množina všech maximálních řešení soustavy (17.3) tvoří vektorový podprostor prostoru C 1 ((α, β), R n ). Dimenze tohoto podprostoru je rovna n.
113 Věta Necht α, β R, α < β. Necht A: (α, β) M(n n), b : (α, β) R n jsou spojitá zobrazení. Necht y je řešení (17.2) na intervalu (α, β). Potom každé řešení x soustavy (17.2) na intervalu (α, β) má tvar y + z, kde z je jisté řešení (17.3).
114 Definice Necht vektorové funkce y 1,..., y n tvoří bázi prostoru řešení rovnice (17.3) na (α, β). Takovou množinu řešení nazýváme fundamentální systém rovnice (17.3). Označme y1 1 (t)... y 1 n(t) y2 1 Φ(t) = (t)... y 2 n(t) yn 1 (t)... yn n (t) Matici Φ nazýváme fundamentální maticí soustavy (17.3).
115 Lemma Necht Φ je fundamentální matice rovnice (17.3). Pak Φ(t) je regulární pro každé t (α, β).
116 Lemma Necht Φ je fundamentální matice rovnice (17.3). Pak Φ(t) je regulární pro každé t (α, β). Věta (variace konstant) Necht α, β R, α < β, t 0 (α, β) a y 0 R n. Pak maximální řešení y rovnice (17.2) s počáteční podmínkou y(t 0 ) = y 0 má tvar t y(t) = Φ(t)Φ 1 (t 0 )y 0 + Φ(t) Φ 1 (s)b(s) ds, t (α, β), t 0 kde Φ je fundamentální matice soustavy (17.3).
117 17.4 Řešení lin. soustav s konst. koeficienty Věta Necht A M(n n) a vektorová funkce y : R R n je řešením soustavy y = Ay. Pak y je třídy C a pro každé k N platí y (k) (x) = A k y(x) pro x R.
118 Definice Matici, jejíž prvky jsou polynomy v proměnné λ, nazýváme λ-maticí.
119 Definice Matici, jejíž prvky jsou polynomy v proměnné λ, nazýváme λ-maticí. Řádkovými úpravami λ-matice rozumíme: záměnu dvou řádků,
120 Definice Matici, jejíž prvky jsou polynomy v proměnné λ, nazýváme λ-maticí. Řádkovými úpravami λ-matice rozumíme: záměnu dvou řádků, vynásobení řádku nenulovou konstantou,
121 Definice Matici, jejíž prvky jsou polynomy v proměnné λ, nazýváme λ-maticí. Řádkovými úpravami λ-matice rozumíme: záměnu dvou řádků, vynásobení řádku nenulovou konstantou, přičtení P(λ)-násobku jednoho řádku k jinému řádku, kde P(λ) je polynom v proměnné λ.
122 Definice Matici, jejíž prvky jsou polynomy v proměnné λ, nazýváme λ-maticí. Řádkovými úpravami λ-matice rozumíme: záměnu dvou řádků, vynásobení řádku nenulovou konstantou, přičtení P(λ)-násobku jednoho řádku k jinému řádku, kde P(λ) je polynom v proměnné λ. Lemma Necht Λ = (P 1,..., P n ) T je λ-matice. Potom ji lze konečnou posloupností řádkových úprav převést na λ-matici Λ = ( P 1,..., P n ) T, kde nejvýše jeden z polynomů P 1,..., P n je nenulový.
123 Věta Necht A M(n n). Pak lze λ-matici λi A převést konečnou posloupností řádkových úprav na horní trojúhelníkovou λ-matici. Výsledná λ-matice má na diagonále nenulové polynomy, součet jejichž stupňů je n.
124 Označení Necht P(λ) = a n λ n + a n 1 λ n a 1 λ + a 0 je polynom a y : R R je funkce mající vlastní derivaci n-tého řádu na R. Potom symbol P( d )y značí funkci dx a n y (n) + a n 1 y (n 1) + + a 1 y + a 0 y.
125 Označení Necht P = (P ij ) je λ-matice typu n n. Soustavou diferenciálních rovnic odpovídající P budeme rozumět soustavu P 11 ( d dx )y P 1n ( d dx )y n = 0, P 21 ( d dx )y P 2n ( d dx )y n = 0, P n1 ( d dx )y P nn ( d dx )y n = 0..
126 Věta Necht λ-matice P vznikla konečnou posloupností řádkových úprav z λ-matice P. Potom vektorová funkce y : R R n třídy C je řešením soustavy odpovídající matici P, právě když je řešením soustavy odpovídající P.
127 Příklad 1 y 1 = 4y 1 + 5y 2 y 2 = 2y 1 2y 2
128 Příklad 1 y 1 = 4y 1 + 5y 2 λi A = y 2 = 2y 1 2y 2 ( ) λ λ + 2
129 Příklad 1 y 1 = 4y 1 + 5y 2 λi A = y 2 = 2y 1 2y 2 ( ) λ λ + 2 ( 1 1 λ + 1 ) 2 0 λ 2 2λ + 2
130 Příklad 1 y 1 = 4y 1 + 5y 2 λi A = y 2 = 2y 1 2y 2 ( ) λ λ + 2 ( 1 1 λ + 1 ) 2 0 λ 2 2λ + 2 y y 2 + y 2 = 0 y 2 2y 2 + 2y 2 = 0
131 y 2 = α 1 e t sin t + α 2 e t cos t ( y 1 = 3 2 α ) 2 α 2 e t sin t + ( 1 2 α 1 3 ) 2 α 2 e t cos t
132 y 2 = α 1 e t sin t + α 2 e t cos t ( y 1 = 3 2 α ) 2 α 2 e t sin t + ( 1 2 α 1 3 ) 2 α 2 e t cos t
133 Příklad 2 u = u + 2v + sin t v = 2u + 3v + cos t
134 Příklad 2 u = u + 2v + sin t v = 2u + 3v + cos t ( λ ) sin t 2 λ 3 cos t
135 Příklad 2 u = u + 2v + sin t v = 2u + 3v + cos t ( ) λ sin t 2 λ 3 cos t ( ) 2 λ 3 cos t λ sin t
136 Příklad 2 u = u + 2v + sin t v = 2u + 3v + cos t ( ) λ sin t 2 λ 3 cos t ( ) 2 λ 3 cos t λ sin t ( ) 2 λ 3 cos t λ2 + λ 1 sin t 1λ cos t 1 cos t 2 2 2
137 Příklad 2 u = u + 2v + sin t v = 2u + 3v + cos t ( ) λ sin t 2 λ 3 cos t ( ) 2 λ 3 cos t λ sin t ( ) 2 λ 3 cos t λ2 + λ 1 sin t 1λ cos t 1 cos t u + v 3v = cos t
138 Příklad 2 u = u + 2v + sin t v = 2u + 3v + cos t ( ) λ sin t 2 λ 3 cos t ( ) 2 λ 3 cos t λ sin t ( ) 2 λ 3 cos t λ2 + λ 1 sin t 1λ cos t 1 cos t u + v 3v = cos t 1 2 v + v 1 2 v = sin t 1 2 (cos t) 1 2 cos t
139 Příklad 2 u = u + 2v + sin t v = 2u + 3v + cos t ( ) λ sin t 2 λ 3 cos t ( ) 2 λ 3 cos t λ sin t ( ) 2 λ 3 cos t λ2 + λ 1 sin t 1λ cos t 1 cos t u + v 3v = cos t v 2v + v = cos t 3 sin t
140 charakteristický polynom: λ2 2λ + 1 = (λ 1)2
141 charakteristický polynom: λ 2 2λ + 1 = (λ 1) 2 fundamentální systém: e t, te t
142 charakteristický polynom: λ 2 2λ + 1 = (λ 1) 2 fundamentální systém: e t, te t partikulární řešení existuje ve tvaru v p (t) = a cos t + b sin t
143 charakteristický polynom: λ 2 2λ + 1 = (λ 1) 2 fundamentální systém: e t, te t partikulární řešení existuje ve tvaru v p (t) = a cos t + b sin t v p(t) = b cos t a sin t, v p (t) = a cos t b sin t
144 charakteristický polynom: λ 2 2λ + 1 = (λ 1) 2 fundamentální systém: e t, te t partikulární řešení existuje ve tvaru v p (t) = a cos t + b sin t v p(t) = b cos t a sin t, v p (t) = a cos t b sin t
145 charakteristický polynom: λ 2 2λ + 1 = (λ 1) 2 fundamentální systém: e t, te t partikulární řešení existuje ve tvaru v p (t) = a cos t + b sin t v p(t) = b cos t a sin t, v p (t) = a cos t b sin t 2b cos t + 2a sin t = cos t 3 sin t
146 charakteristický polynom: λ 2 2λ + 1 = (λ 1) 2 fundamentální systém: e t, te t partikulární řešení existuje ve tvaru v p (t) = a cos t + b sin t v p(t) = b cos t a sin t, v p (t) = a cos t b sin t 2b cos t + 2a sin t = cos t 3 sin t b = 1/2, a = 3/2
147 charakteristický polynom: λ 2 2λ + 1 = (λ 1) 2 fundamentální systém: e t, te t partikulární řešení existuje ve tvaru v p (t) = a cos t + b sin t v p(t) = b cos t a sin t, v p (t) = a cos t b sin t 2b cos t + 2a sin t = cos t 3 sin t b = 1/2, a = 3/2 obecné řešení: v(t) = 3 2 cos t 1 2 sin t + (ct + d)et.
148 charakteristický polynom: λ 2 2λ + 1 = (λ 1) 2 fundamentální systém: e t, te t partikulární řešení existuje ve tvaru v p (t) = a cos t + b sin t v p(t) = b cos t a sin t, v p (t) = a cos t b sin t 2b cos t + 2a sin t = cos t 3 sin t b = 1/2, a = 3/2 obecné řešení: v(t) = 3 2 cos t 1 2 sin t + (ct + d)et. u(t) = 1 2 cos t 1 2 v (t) v(t)
149 charakteristický polynom: λ 2 2λ + 1 = (λ 1) 2 fundamentální systém: e t, te t partikulární řešení existuje ve tvaru v p (t) = a cos t + b sin t v p(t) = b cos t a sin t, v p (t) = a cos t b sin t 2b cos t + 2a sin t = cos t 3 sin t b = 1/2, a = 3/2 obecné řešení: v(t) = 3 2 cos t 1 2 sin t + (ct + d)et. u(t) = 1 2 cos t 1 2 v (t) v(t) u(t) = 3 2 cos t 3 2 sin t + ( ct 1 2 c + d ) e t.
150 Závěrečná poznámka o stabilitě řešení λ 1 > 0, λ 2 > 0, λ 1 λ 2
151 λ1 < 0, λ2 < 0, λ1 6= λ2
152 λ1 < 0 < λ2
153 λ 1 C \ R, Rλ 1 > 0
154 λ 1 C \ R, Rλ 1 < 0
Diferenˇcní rovnice Diferenciální rovnice Matematika IV Matematika IV Program
 Program Diferenční rovnice Program Diferenční rovnice Diferenciální rovnice Program Frisch a Samuelson: Systém je dynamický, jestliže jeho chování v čase je určeno funkcionální rovnicí, jejíž neznámé závisí
Program Diferenční rovnice Program Diferenční rovnice Diferenciální rovnice Program Frisch a Samuelson: Systém je dynamický, jestliže jeho chování v čase je určeno funkcionální rovnicí, jejíž neznámé závisí
Matematika 2 LS 2012/13. Prezentace vznikla na základě učebního textu, jehož autorem je doc. RNDr. Mirko Rokyta, CSc. J. Stebel Matematika 2
 Matematika 2 13. přednáška Obyčejné diferenciální rovnice Jan Stebel Fakulta mechatroniky, informatiky a mezioborových studíı Technická univerzita v Liberci jan.stebel@tul.cz http://bacula.nti.tul.cz/~jan.stebel
Matematika 2 13. přednáška Obyčejné diferenciální rovnice Jan Stebel Fakulta mechatroniky, informatiky a mezioborových studíı Technická univerzita v Liberci jan.stebel@tul.cz http://bacula.nti.tul.cz/~jan.stebel
12 Obyčejné diferenciální rovnice a jejich soustavy
 12 Obyčejné diferenciální rovnice a jejich soustavy 121 Úvod - opakování Opakování z 1 ročníku (z kapitoly 5) Definice 121 Rovnice se separovanými proměnnými je rovnice tvaru Návod k řešení: Pokud g(c)
12 Obyčejné diferenciální rovnice a jejich soustavy 121 Úvod - opakování Opakování z 1 ročníku (z kapitoly 5) Definice 121 Rovnice se separovanými proměnnými je rovnice tvaru Návod k řešení: Pokud g(c)
Učební texty k státní bakalářské zkoušce Matematika Diferenciální rovnice. študenti MFF 15. augusta 2008
 Učební texty k státní bakalářské zkoušce Matematika Diferenciální rovnice študenti MFF 15. augusta 2008 1 7 Diferenciální rovnice Požadavky Soustavy lineárních diferenciálních rovnic prvního řádu lineární
Učební texty k státní bakalářské zkoušce Matematika Diferenciální rovnice študenti MFF 15. augusta 2008 1 7 Diferenciální rovnice Požadavky Soustavy lineárních diferenciálních rovnic prvního řádu lineární
Matematika 5 FSV UK, ZS Miroslav Zelený
 Matematika 5 FSV UK, ZS 2018-19 Miroslav Zelený 1. Stabilita řešení soustav diferenciálních rovnic 2. Úvod do variačního počtu 3. Globální extrémy 4. Teorie optimálního řízení 5. Různé 1. Stabilita řešení
Matematika 5 FSV UK, ZS 2018-19 Miroslav Zelený 1. Stabilita řešení soustav diferenciálních rovnic 2. Úvod do variačního počtu 3. Globální extrémy 4. Teorie optimálního řízení 5. Různé 1. Stabilita řešení
Primitivní funkce a Riemann uv integrál Lineární algebra Taylor uv polynom Extrémy funkcí více prom ˇenných Matematika III Matematika III Program
 Program Primitivní funkce a Riemannův integrál Program Primitivní funkce a Riemannův integrál Lineární algebra Program Primitivní funkce a Riemannův integrál Lineární algebra Taylorův polynom Program Primitivní
Program Primitivní funkce a Riemannův integrál Program Primitivní funkce a Riemannův integrál Lineární algebra Program Primitivní funkce a Riemannův integrál Lineární algebra Taylorův polynom Program Primitivní
Fakt. Každou soustavu n lineárních ODR řádů n i lze eliminací převést ekvivalentně na jednu lineární ODR
 DEN: ODR teoreticky: soustavy rovnic Soustava lineárních ODR 1 řádu s konstantními koeficienty je soustava ve tvaru y 1 = a 11 y 1 + a 12 y 2 + + a 1n y n + b 1 (x) y 2 = a 21 y 1 + a 22 y 2 + + a 2n y
DEN: ODR teoreticky: soustavy rovnic Soustava lineárních ODR 1 řádu s konstantními koeficienty je soustava ve tvaru y 1 = a 11 y 1 + a 12 y 2 + + a 1n y n + b 1 (x) y 2 = a 21 y 1 + a 22 y 2 + + a 2n y
Soustavy lineárních rovnic
 Soustavy lineárních rovnic V této kapitole se budeme zabývat soustavami lineárních diferenciálních rovnic y = a (x)y + a (x)y + + a n (x)y n + f (x) y = a (x)y + a (x)y + + a n (x)y n + f (x). y n = a
Soustavy lineárních rovnic V této kapitole se budeme zabývat soustavami lineárních diferenciálních rovnic y = a (x)y + a (x)y + + a n (x)y n + f (x) y = a (x)y + a (x)y + + a n (x)y n + f (x). y n = a
LDF MENDELU. Simona Fišnarová (MENDELU) LDR druhého řádu VMAT, IMT 1 / 22
 LDR druhého řádu VMAT, IMT 1 / 22") Lineární diferenciální rovnice druhého řádu Vyšší matematika, Inženýrská matematika LDF MENDELU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF)
Lineární diferenciální rovnice druhého řádu Vyšší matematika, Inženýrská matematika LDF MENDELU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF)
Kapitola 11: Lineární diferenciální rovnice 1/15
 Kapitola 11: Lineární diferenciální rovnice 1/15 Lineární diferenciální rovnice 2. řádu Definice: Lineární diferenciální rovnice 2-tého řádu je rovnice tvaru kde: y C 2 (I) je hledaná funkce a 0 (x)y +
Kapitola 11: Lineární diferenciální rovnice 1/15 Lineární diferenciální rovnice 2. řádu Definice: Lineární diferenciální rovnice 2-tého řádu je rovnice tvaru kde: y C 2 (I) je hledaná funkce a 0 (x)y +
Rovnice se separovanými proměnnými
 Rovnice se separovanými proměnnými V této kapitole se budeme zabývat následující diferenciální rovnicí: y = g(y)f(x), (1) kde f a g jsou reálné funkce reálné proměnné. Tato rovnice se nazývá rovnice se
Rovnice se separovanými proměnnými V této kapitole se budeme zabývat následující diferenciální rovnicí: y = g(y)f(x), (1) kde f a g jsou reálné funkce reálné proměnné. Tato rovnice se nazývá rovnice se
16 Obyčejné diferenciální rovnice a jejich soustavy
 M Rokyta, MFF UK: Aplikovaná matematika III kap 16: Obyčejné diferenciální rovnice a jejich soustavy 13 16 Obyčejné diferenciální rovnice a jejich soustavy 161 Úvod - opakování Opakování z 1 ročníku (z
M Rokyta, MFF UK: Aplikovaná matematika III kap 16: Obyčejné diferenciální rovnice a jejich soustavy 13 16 Obyčejné diferenciální rovnice a jejich soustavy 161 Úvod - opakování Opakování z 1 ročníku (z
1.1 Existence a jednoznačnost řešení. Příklad 1.1: [M2-P1] diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu
![1.1 Existence a jednoznačnost řešení. Příklad 1.1: [M2-P1] diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu](/thumbs/102/155926571.jpg "1.1 Existence a jednoznačnost řešení. Příklad 1.1: [M2-P1] diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu") [M2-P1] KAPITOLA 1: Diferenciální rovnice 1. řádu diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu G(x, y, y, y,..., y (n) ) = 0 y (n) = F (x, y, y,..., y (n 1) ) Příklad 1.1:
[M2-P1] KAPITOLA 1: Diferenciální rovnice 1. řádu diferenciální rovnice (DR) řádu n: speciálně nás budou zajímat rovnice typu G(x, y, y, y,..., y (n) ) = 0 y (n) = F (x, y, y,..., y (n 1) ) Příklad 1.1:
22 Základní vlastnosti distribucí
 M. Rokyta, MFF UK: Aplikovaná matematika IV kap. 22: Základní vlastnosti distribucí 5 22 Základní vlastnosti distribucí 22.1 Temperované distribuce Definice. O funkci ϕ C (R m ) řekneme, že je rychle klesající
M. Rokyta, MFF UK: Aplikovaná matematika IV kap. 22: Základní vlastnosti distribucí 5 22 Základní vlastnosti distribucí 22.1 Temperované distribuce Definice. O funkci ϕ C (R m ) řekneme, že je rychle klesající
Věta 12.3 : Věta 12.4 (princip superpozice) : [MA1-18:P12.7] rovnice typu y (n) + p n 1 (x)y (n 1) p 1 (x)y + p 0 (x)y = q(x) (6)
![Věta 12.3 : Věta 12.4 (princip superpozice) : [MA1-18:P12.7] rovnice typu y (n) + p n 1 (x)y (n 1) p 1 (x)y + p 0 (x)y = q(x) (6)](/thumbs/96/128965676.jpg "Věta 12.3 : Věta 12.4 (princip superpozice) : [MA1-18:P12.7] rovnice typu y (n) + p n 1 (x)y (n 1) p 1 (x)y + p 0 (x)y = q(x) (6)") 1. Lineární diferenciální rovnice řádu n [MA1-18:P1.7] rovnice typu y n) + p n 1 )y n 1) +... + p 1 )y + p 0 )y = q) 6) počáteční podmínky: y 0 ) = y 0 y 0 ) = y 1 y n 1) 0 ) = y n 1. 7) Věta 1.3 : Necht
1. Lineární diferenciální rovnice řádu n [MA1-18:P1.7] rovnice typu y n) + p n 1 )y n 1) +... + p 1 )y + p 0 )y = q) 6) počáteční podmínky: y 0 ) = y 0 y 0 ) = y 1 y n 1) 0 ) = y n 1. 7) Věta 1.3 : Necht
Matematika I A ukázkový test 1 pro 2011/2012. x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a
x + (a + 1)y + z = 1 a") Matematika I A ukázkový test 1 pro 2011/2012 1. Je dána soustava rovnic s parametrem a R x y + z = 1 a) Napište Frobeniovu větu. x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a b) Vyšetřete počet řešení soustavy
Matematika I A ukázkový test 1 pro 2011/2012 1. Je dána soustava rovnic s parametrem a R x y + z = 1 a) Napište Frobeniovu větu. x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a b) Vyšetřete počet řešení soustavy
Diferenciální rovnice
 Obyčejné diferenciální rovnice - studijní text pro cvičení v předmětu Matematika - 2. Studijní materiál byl připraven pracovníky katedry E. Novákovou, M. Hyánkovou a L. Průchou za podpory grantu IG ČVUT
Obyčejné diferenciální rovnice - studijní text pro cvičení v předmětu Matematika - 2. Studijní materiál byl připraven pracovníky katedry E. Novákovou, M. Hyánkovou a L. Průchou za podpory grantu IG ČVUT
DMA Přednáška Rekurentní rovnice. takovou, že po dosazení odpovídajících členů do dané rovnice dostáváme pro všechna n n 0 + m pravdivý výrok.
 DMA Přednáška Rekurentní rovnice Rekurentní rovnice či rekurzivní rovnice pro posloupnost {a n } je vztah a n+1 = G(a n, a n 1,..., a n m ), n n 0 + m, kde G je nějaká funkce m + 1 proměnných. Jejím řešením
DMA Přednáška Rekurentní rovnice Rekurentní rovnice či rekurzivní rovnice pro posloupnost {a n } je vztah a n+1 = G(a n, a n 1,..., a n m ), n n 0 + m, kde G je nějaká funkce m + 1 proměnných. Jejím řešením
10 Funkce více proměnných
 M. Rokyta, MFF UK: Aplikovaná matematika II kap. 10: Funkce více proměnných 16 10 Funkce více proměnných 10.1 Základní pojmy Definice. Eukleidovskou vzdáleností bodů x = (x 1,...,x n ), y = (y 1,...,y
M. Rokyta, MFF UK: Aplikovaná matematika II kap. 10: Funkce více proměnných 16 10 Funkce více proměnných 10.1 Základní pojmy Definice. Eukleidovskou vzdáleností bodů x = (x 1,...,x n ), y = (y 1,...,y
Kapitola 12: Soustavy diferenciálních rovnic 1. řádu
 Kapitola 12: Soustavy diferenciálních rovnic 1. řádu Základní pojmy Definice: Rovnice tvaru = f(t, x, y) = g(t, x, y), t I nazýváme soustavou dvou diferenciálních rovnic 1. řádu. Řešením soustavy rozumíme
Kapitola 12: Soustavy diferenciálních rovnic 1. řádu Základní pojmy Definice: Rovnice tvaru = f(t, x, y) = g(t, x, y), t I nazýváme soustavou dvou diferenciálních rovnic 1. řádu. Řešením soustavy rozumíme
Matematika I A ukázkový test 1 pro 2014/2015
 Matematika I A ukázkový test 1 pro 2014/2015 1. Je dána soustava rovnic s parametrem a R x y + z = 1 x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a a) Napište Frobeniovu větu (existence i počet řešení). b)
Matematika I A ukázkový test 1 pro 2014/2015 1. Je dána soustava rovnic s parametrem a R x y + z = 1 x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a a) Napište Frobeniovu větu (existence i počet řešení). b)
FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ
 FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Leden 2015 Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193
FAKULTA ELEKTROTECHNIKY A KOMUNIKAČNÍCH TECHNOLOGIÍ VYSOKÉ UČENÍ TECHNICKÉ V BRNĚ Leden 2015 Komplexní inovace studijních programů a zvyšování kvality výuky na FEKT VUT v Brně OP VK CZ.1.07/2.2.00/28.0193
11. přednáška 10. prosince Kapitola 3. Úvod do teorie diferenciálních rovnic. Obyčejná diferenciální rovnice řádu n (ODR řádu n) je vztah
 je vztah") 11. přednáška 10. prosince 2007 Kapitola 3. Úvod do teorie diferenciálních rovnic. Obyčejná diferenciální rovnice řádu n (ODR řádu n) je vztah F (x, y, y, y,..., y (n) ) = 0 mezi argumentem x funkce jedné
11. přednáška 10. prosince 2007 Kapitola 3. Úvod do teorie diferenciálních rovnic. Obyčejná diferenciální rovnice řádu n (ODR řádu n) je vztah F (x, y, y, y,..., y (n) ) = 0 mezi argumentem x funkce jedné
Lineární rovnice prvního řádu. Máme řešit nehomogenní lineární diferenciální rovnici prvního řádu. Funkce h(t) = 2
 = 2") Cvičení Lineární rovnice prvního řádu. Najděte řešení Cauchyovy úlohy x + x tg t = cos t, které vyhovuje podmínce xπ =. Máme nehomogenní lineární diferenciální rovnici prvního řádu. Funkce ht = tg t a
Cvičení Lineární rovnice prvního řádu. Najděte řešení Cauchyovy úlohy x + x tg t = cos t, které vyhovuje podmínce xπ =. Máme nehomogenní lineární diferenciální rovnici prvního řádu. Funkce ht = tg t a
Definice 1.1. Nechť je M množina. Funkci ρ : M M R nazveme metrikou, jestliže má následující vlastnosti:
 Přednáška 1. Definice 1.1. Nechť je množina. Funkci ρ : R nazveme metrikou, jestliže má následující vlastnosti: (1 pro každé x je ρ(x, x = 0; (2 pro každé x, y, x y, je ρ(x, y = ρ(y, x > 0; (3 pro každé
Přednáška 1. Definice 1.1. Nechť je množina. Funkci ρ : R nazveme metrikou, jestliže má následující vlastnosti: (1 pro každé x je ρ(x, x = 0; (2 pro každé x, y, x y, je ρ(x, y = ρ(y, x > 0; (3 pro každé
VIII. Primitivní funkce a Riemannův integrál
 VIII. Primitivní funkce Riemnnův integrál VIII.2. Riemnnův integrál opkování Vět. Nechť f je spojitá funkce n intervlu, b nechť c, b. Oznčíme-li F (x) = x (, b), pk F (x) = f(x) pro kždé x (, b). VIII.3.
VIII. Primitivní funkce Riemnnův integrál VIII.2. Riemnnův integrál opkování Vět. Nechť f je spojitá funkce n intervlu, b nechť c, b. Oznčíme-li F (x) = x (, b), pk F (x) = f(x) pro kždé x (, b). VIII.3.
Nejdřív spočítáme jeden příklad na variaci konstant pro lineární diferenciální rovnici 2. řádu s kostantními koeficienty. y + y = 4 sin t.
 1 Variace konstanty Nejdřív spočítáme jeden příklad na variaci konstant pro lineární diferenciální rovnici 2. řádu s kostantními koeficienty. Příklad 1 Najděte obecné řešení rovnice: y + y = 4 sin t. Co
1 Variace konstanty Nejdřív spočítáme jeden příklad na variaci konstant pro lineární diferenciální rovnici 2. řádu s kostantními koeficienty. Příklad 1 Najděte obecné řešení rovnice: y + y = 4 sin t. Co
Diferenciální rovnice a jejich aplikace. (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36
 Diferenciální rovnice a jejich aplikace 1 / 36") Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
Diferenciální rovnice a jejich aplikace Zdeněk Kadeřábek (Brkos 2011) Diferenciální rovnice a jejich aplikace 1 / 36 Obsah 1 Co to je derivace? 2 Diferenciální rovnice 3 Systémy diferenciálních rovnic
1 Existence e²ení systému diferenciálních rovnic. 2 Jednozna nost e²ení pro systém diferenciálních rovnic
 1 Existence e²ení systému diferenciálních rovnic Denice. Funkci x : I R n, I otev ený interval, nazveme e²ením (DR), jestliºe 1. t I : (x(t), t) Ω 2. t I : x (t) vlastní 3. t I : x (t) = f(x(t), t) Lemma
1 Existence e²ení systému diferenciálních rovnic Denice. Funkci x : I R n, I otev ený interval, nazveme e²ením (DR), jestliºe 1. t I : (x(t), t) Ω 2. t I : x (t) vlastní 3. t I : x (t) = f(x(t), t) Lemma
1/15. Kapitola 12: Soustavy diferenciálních rovnic 1. řádu
 1/15 Kapitola 12: Soustavy diferenciálních rovnic 1. řádu 2/15 Vsuvka: Vlastní čísla matic Definice: Bud A čtvercová matice a vektor h 0 splňující rovnici A h = λ h pro nějaké číslo λ R. Potom λ nazýváme
1/15 Kapitola 12: Soustavy diferenciálních rovnic 1. řádu 2/15 Vsuvka: Vlastní čísla matic Definice: Bud A čtvercová matice a vektor h 0 splňující rovnici A h = λ h pro nějaké číslo λ R. Potom λ nazýváme
Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice
 Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice Vektorové podprostory K množina reálných nebo komplexních čísel, U vektorový prostor nad K. Lineární kombinace vektorů u 1, u 2,...,u
Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice Vektorové podprostory K množina reálných nebo komplexních čísel, U vektorový prostor nad K. Lineární kombinace vektorů u 1, u 2,...,u
OBYČEJNÉ DIFERENCIÁLNÍ ROVNICE
 OBYČEJNÉ DIFERENCIÁLNÍ ROVNICE Diferenciální rovnice patří mezi nejužívanější nástroje matematiky v aplikacích. Jsou to rovnice, kde neznámou je funkce a rovnice obsahuje i derivace této funkce. Lze očekávat,
OBYČEJNÉ DIFERENCIÁLNÍ ROVNICE Diferenciální rovnice patří mezi nejužívanější nástroje matematiky v aplikacích. Jsou to rovnice, kde neznámou je funkce a rovnice obsahuje i derivace této funkce. Lze očekávat,
Soustavy lineárních rovnic
 Přednáška MATEMATIKA č 4 Katedra ekonometrie FEM UO Brno kancelář 69a, tel 973 442029 email:jirineubauer@unobcz 27 10 2010 Soustava lineárních rovnic Definice Soustava rovnic a 11 x 1 + a 12 x 2 + + a
Přednáška MATEMATIKA č 4 Katedra ekonometrie FEM UO Brno kancelář 69a, tel 973 442029 email:jirineubauer@unobcz 27 10 2010 Soustava lineárních rovnic Definice Soustava rovnic a 11 x 1 + a 12 x 2 + + a
Diferenciální rovnice 3
 Diferenciální rovnice 3 Lineární diferenciální rovnice n-tého řádu Lineární diferenciální rovnice (dále jen LDR) n-tého řádu je rovnice tvaru + + + + = kde = je hledaná funkce, pravá strana a koeficienty
Diferenciální rovnice 3 Lineární diferenciální rovnice n-tého řádu Lineární diferenciální rovnice (dále jen LDR) n-tého řádu je rovnice tvaru + + + + = kde = je hledaná funkce, pravá strana a koeficienty
Interpolace, ortogonální polynomy, Gaussova kvadratura
 Interpolace, ortogonální polynomy, Gaussova kvadratura Petr Tichý 20. listopadu 2013 1 Úloha Lagrangeovy interpolace Dán omezený uzavřený interval [a, b] a v něm n + 1 různých bodů x 0, x 1,..., x n. Nechť
Interpolace, ortogonální polynomy, Gaussova kvadratura Petr Tichý 20. listopadu 2013 1 Úloha Lagrangeovy interpolace Dán omezený uzavřený interval [a, b] a v něm n + 1 různých bodů x 0, x 1,..., x n. Nechť
4. OBYČEJNÉ DIFERENCIÁLNÍ ROVNICE
 FBI VŠB-TUO 28. března 2014 4.1. Základní pojmy Definice 4.1. Rovnice tvaru F (x, y, y, y,..., y (n) ) = 0 se nazývá obyčejná diferenciální rovnice n-tého řádu a vyjadřuje vztah mezi neznámou funkcí y
FBI VŠB-TUO 28. března 2014 4.1. Základní pojmy Definice 4.1. Rovnice tvaru F (x, y, y, y,..., y (n) ) = 0 se nazývá obyčejná diferenciální rovnice n-tého řádu a vyjadřuje vztah mezi neznámou funkcí y
pouze u některých typů rovnic a v tomto textu se jím nebudeme až na
 Matematika II 7.1. Zavedení diferenciálních rovnic Definice 7.1.1. Rovnice tvaru F(y (n), y (n 1),, y, y, x) = 0 se nazývá diferenciální rovnice n-tého řádu pro funkci y = y(x). Speciálně je F(y, y, x)
Matematika II 7.1. Zavedení diferenciálních rovnic Definice 7.1.1. Rovnice tvaru F(y (n), y (n 1),, y, y, x) = 0 se nazývá diferenciální rovnice n-tého řádu pro funkci y = y(x). Speciálně je F(y, y, x)
Inverzní Laplaceova transformace
 Inverzní Laplaceova transformace Modelování systémů a procesů (MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 6. přednáška MSP čtvrtek 30. března
Inverzní Laplaceova transformace Modelování systémů a procesů (MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 6. přednáška MSP čtvrtek 30. března
OBYČEJNÉ DIFERENCIÁLNÍ ROVNICE DIFERENCIÁLNÍ ROVNICE 1.ŘÁDU
 OBYČEJNÉ DIFERENCIÁLNÍ ROVNICE Diferenciální rovnice patří mezi nejužívanější nástroje matematiky v aplikacích. Jsou to rovnice, kde neznámou je funkce a rovnice obsahuje i derivace této funkce. Lze očekávat,
OBYČEJNÉ DIFERENCIÁLNÍ ROVNICE Diferenciální rovnice patří mezi nejužívanější nástroje matematiky v aplikacích. Jsou to rovnice, kde neznámou je funkce a rovnice obsahuje i derivace této funkce. Lze očekávat,
MATICE. a 11 a 12 a 1n a 21 a 22 a 2n A = = [a ij]
![MATICE. a 11 a 12 a 1n a 21 a 22 a 2n A = = [a ij]](/thumbs/58/41721403.jpg "MATICE. a 11 a 12 a 1n a 21 a 22 a 2n A = = [a ij]") MATICE Matice typu m/n nad tělesem T je soubor m n prvků z tělesa T uspořádaných do m řádků a n sloupců: a 11 a 12 a 1n a 21 a 22 a 2n A = = [a ij] a m1 a m2 a mn Prvek a i,j je prvek matice A na místě
MATICE Matice typu m/n nad tělesem T je soubor m n prvků z tělesa T uspořádaných do m řádků a n sloupců: a 11 a 12 a 1n a 21 a 22 a 2n A = = [a ij] a m1 a m2 a mn Prvek a i,j je prvek matice A na místě
VI. Maticový počet. VI.1. Základní operace s maticemi. Definice. Tabulku
 VI Maticový počet VI1 Základní operace s maticemi Definice Tabulku a 11 a 12 a 1n a 21 a 22 a 2n, a m1 a m2 a mn kde a ij R, i = 1,, m, j = 1,, n, nazýváme maticí typu m n Zkráceně zapisujeme (a ij i=1m
VI Maticový počet VI1 Základní operace s maticemi Definice Tabulku a 11 a 12 a 1n a 21 a 22 a 2n, a m1 a m2 a mn kde a ij R, i = 1,, m, j = 1,, n, nazýváme maticí typu m n Zkráceně zapisujeme (a ij i=1m
Greenova funkce pro dvoubodové okrajové úlohy pro obyčejné diferenciální rovnice
 Greenova funkce pro dvoubodové okrajové úlohy pro obyčejné diferenciální rovnice Jan Tomeček Tento stručný text si klade za cíl co nejrychlejší uvedení do teorie Greenových funkcí pro obyčejné diferenciální
Greenova funkce pro dvoubodové okrajové úlohy pro obyčejné diferenciální rovnice Jan Tomeček Tento stručný text si klade za cíl co nejrychlejší uvedení do teorie Greenových funkcí pro obyčejné diferenciální
18 Fourierovy řady Úvod, základní pojmy
 M. Rokyta, MFF UK: Aplikovaná matematika III kap. 18: Fourierovy řady 7 18 Fourierovy řady 18.1 Úvod, základní pojmy Otázka J. Fouriera: Lze každou periodickou funkci napsat jako součet nějakých "elementárních"
M. Rokyta, MFF UK: Aplikovaná matematika III kap. 18: Fourierovy řady 7 18 Fourierovy řady 18.1 Úvod, základní pojmy Otázka J. Fouriera: Lze každou periodickou funkci napsat jako součet nějakých "elementárních"
17. Posloupnosti a řady funkcí
 17. Posloupnosti a řady funkcí Aplikovaná matematika III, NMAF073 M. Rokyta, KMA MFF UK ZS 2011/12 17.1 Stejnoměrná konvergence posloupnosti funkcí Definice Necht M je množina, f, f n : M R m, m, n N.
17. Posloupnosti a řady funkcí Aplikovaná matematika III, NMAF073 M. Rokyta, KMA MFF UK ZS 2011/12 17.1 Stejnoměrná konvergence posloupnosti funkcí Definice Necht M je množina, f, f n : M R m, m, n N.
Drsná matematika III 6. přednáška Obyčejné diferenciální rovnice vyšších řádů, Eulerovo přibližné řešení a poznámky o odhadech chyb
 Drsná matematika III 6. přednáška Obyčejné diferenciální rovnice vyšších řádů, Eulerovo přibližné řešení a poznámky o odhadech chyb Jan Slovák Masarykova univerzita Fakulta informatiky 23. 10. 2006 Obsah
Drsná matematika III 6. přednáška Obyčejné diferenciální rovnice vyšších řádů, Eulerovo přibližné řešení a poznámky o odhadech chyb Jan Slovák Masarykova univerzita Fakulta informatiky 23. 10. 2006 Obsah
Matematická analýza 4
 Matematická analýza 4 LS 2015-16 Miroslav Zelený 18. Metrické prostory III 19. Křivkový a plošný integrál 20. Absolutně spoj. fce a fce s konečnou variací 21. Fourierovy řady 18. Metrické prostory III
Matematická analýza 4 LS 2015-16 Miroslav Zelený 18. Metrické prostory III 19. Křivkový a plošný integrál 20. Absolutně spoj. fce a fce s konečnou variací 21. Fourierovy řady 18. Metrické prostory III
Komplexní analýza. Laplaceova transformace. Martin Bohata. Katedra matematiky FEL ČVUT v Praze
 Komplexní analýza Laplaceova transformace Martin Bohata Katedra matematiky FEL ČVUT v Praze bohata@math.feld.cvut.cz Martin Bohata Komplexní analýza Laplaceova transformace 1 / 18 Definice Definice Laplaceovou
Komplexní analýza Laplaceova transformace Martin Bohata Katedra matematiky FEL ČVUT v Praze bohata@math.feld.cvut.cz Martin Bohata Komplexní analýza Laplaceova transformace 1 / 18 Definice Definice Laplaceovou
Dnešní látka: Literatura: Kapitoly 3 a 4 ze skript Karel Rektorys: Matematika 43, ČVUT, Praha, Text přednášky na webové stránce přednášejícího.
 Předmět: MA4 Dnešní látka: Od okrajových úloh v 1D k o. ú. ve 2D Laplaceův diferenciální operátor Variačně formulované okrajové úlohy pro parciální diferenciální rovnice a metody jejich přibližného řešení
Předmět: MA4 Dnešní látka: Od okrajových úloh v 1D k o. ú. ve 2D Laplaceův diferenciální operátor Variačně formulované okrajové úlohy pro parciální diferenciální rovnice a metody jejich přibližného řešení
0.1 Úvod do lineární algebry
 Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Vektory Definice 011 Vektorem aritmetického prostorur n budeme rozumět uspořádanou n-tici reálných čísel x 1, x 2,, x n Definice 012 Definice sčítání
Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Vektory Definice 011 Vektorem aritmetického prostorur n budeme rozumět uspořádanou n-tici reálných čísel x 1, x 2,, x n Definice 012 Definice sčítání
Uzavřené a otevřené množiny
 Teorie: Uzavřené a otevřené množiny 2. cvičení DEFINICE Nechť M R n. Bod x M nazveme vnitřním bodem množiny M, pokud existuje r > 0 tak, že B(x, r) M. Množinu všech vnitřních bodů značíme Int M. Dále,
Teorie: Uzavřené a otevřené množiny 2. cvičení DEFINICE Nechť M R n. Bod x M nazveme vnitřním bodem množiny M, pokud existuje r > 0 tak, že B(x, r) M. Množinu všech vnitřních bodů značíme Int M. Dále,
Matematická analýza 1b. 9. Primitivní funkce
 Matematická analýza 1b 9. Primitivní funkce 9.1 Základní vlastnosti Definice Necht funkce f je definována na neprázdném otevřeném intervalu I. Řekneme, že funkce F je primitivní funkce k f na I, jestliže
Matematická analýza 1b 9. Primitivní funkce 9.1 Základní vlastnosti Definice Necht funkce f je definována na neprázdném otevřeném intervalu I. Řekneme, že funkce F je primitivní funkce k f na I, jestliže
0.1 Úvod do lineární algebry
 Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Lineární rovnice o 2 neznámých Definice 011 Lineární rovnice o dvou neznámých x, y je rovnice, která může být vyjádřena ve tvaru ax + by = c, kde
Matematika KMI/PMATE 1 01 Úvod do lineární algebry 011 Lineární rovnice o 2 neznámých Definice 011 Lineární rovnice o dvou neznámých x, y je rovnice, která může být vyjádřena ve tvaru ax + by = c, kde
Podobnost matic. Definice 8.6. Dány matice A, B M n (C). Jestliže existuje regulární matice P M n (C) tak,
. Jestliže existuje regulární matice P M n (C) tak,") Podobnost matic Definice 84 Dány matice A, B M n (C) Jestliže existuje regulární matice P M n (C) tak, že B = P 1 AP, pak říkáme, že matice B je podobná matici A a píšeme A B Takto zavedená binární relace
Podobnost matic Definice 84 Dány matice A, B M n (C) Jestliže existuje regulární matice P M n (C) tak, že B = P 1 AP, pak říkáme, že matice B je podobná matici A a píšeme A B Takto zavedená binární relace
OBECNOSTI KONVERGENCE V R N
 FUNKCE VÍCE PROMĚNNÝCH V reálných situacích závisejí děje obvykle na více proměnných než jen na jedné (např. na teplotě i na tlaku), závislost na jedné proměnné je spíše výjimkou. OBECNOSTI Reálná funkce
FUNKCE VÍCE PROMĚNNÝCH V reálných situacích závisejí děje obvykle na více proměnných než jen na jedné (např. na teplotě i na tlaku), závislost na jedné proměnné je spíše výjimkou. OBECNOSTI Reálná funkce
9. Vícerozměrná integrace
 9. Vícerozměrná integrace Aplikovaná matematika II, NMAF072 M. Rokyta, KMA MFF UK LS 2016/17 9.1 Elementy teorie míry Poznámka Na R n definujeme systém tzv. měřitelných množin, M n, který má následující
9. Vícerozměrná integrace Aplikovaná matematika II, NMAF072 M. Rokyta, KMA MFF UK LS 2016/17 9.1 Elementy teorie míry Poznámka Na R n definujeme systém tzv. měřitelných množin, M n, který má následující
Petr Hasil. Prvákoviny c Petr Hasil (MUNI) Úvod do infinitezimálního počtu Prvákoviny / 57
 Úvod do infinitezimálního počtu Prvákoviny / 57") Úvod do infinitezimálního počtu Petr Hasil Prvákoviny 2015 c Petr Hasil (MUNI) Úvod do infinitezimálního počtu Prvákoviny 2015 1 / 57 Obsah 1 Úvod Funkce Reálná čísla a posloupnosti Limita a spojitost
Úvod do infinitezimálního počtu Petr Hasil Prvákoviny 2015 c Petr Hasil (MUNI) Úvod do infinitezimálního počtu Prvákoviny 2015 1 / 57 Obsah 1 Úvod Funkce Reálná čísla a posloupnosti Limita a spojitost
Matematika (CŽV Kadaň) aneb Úvod do lineární algebry Matice a soustavy rovnic
 aneb Úvod do lineární algebry Matice a soustavy rovnic") Přednáška třetí (a pravděpodobně i čtvrtá) aneb Úvod do lineární algebry Matice a soustavy rovnic Lineární rovnice o 2 neznámých Lineární rovnice o 2 neznámých Lineární rovnice o dvou neznámých x, y je
Přednáška třetí (a pravděpodobně i čtvrtá) aneb Úvod do lineární algebry Matice a soustavy rovnic Lineární rovnice o 2 neznámých Lineární rovnice o 2 neznámých Lineární rovnice o dvou neznámých x, y je
Dnešní látka Variačně formulované okrajové úlohy zúplnění prostoru funkcí. Lineární zobrazení.
 Předmět: MA4 Dnešní látka Variačně formulované okrajové úlohy zúplnění prostoru funkcí. Lineární zobrazení. Literatura: Kapitola 2 a)-c) a kapitola 4 a)-c) ze skript Karel Rektorys: Matematika 43, ČVUT,
Předmět: MA4 Dnešní látka Variačně formulované okrajové úlohy zúplnění prostoru funkcí. Lineární zobrazení. Literatura: Kapitola 2 a)-c) a kapitola 4 a)-c) ze skript Karel Rektorys: Matematika 43, ČVUT,
Matematika V. Dynamická optimalizace
 Matematika V. Dynamická optimalizace Obsah Kapitola 1. Variační počet 1.1. Derivace funkcí na vektorových prostorech...str. 3 1.2. Derivace integrálu...str. 5 1.3. Formulace základní úlohy P1 var. počtu,
Matematika V. Dynamická optimalizace Obsah Kapitola 1. Variační počet 1.1. Derivace funkcí na vektorových prostorech...str. 3 1.2. Derivace integrálu...str. 5 1.3. Formulace základní úlohy P1 var. počtu,
Soustavy. Terminologie. Dva pohledy na soustavu lin. rovnic. Definice: Necht A = (a i,j ) R m,n je matice, b R m,1 je jednosloupcová.
 R m,n je matice, b R m,1 je jednosloupcová.") [1] Terminologie [2] Soustavy lineárních rovnic vlastnosti množin řešení metody hledání řešení nejednoznačnost zápisu řešení Definice: Necht A = (a i,j ) R m,n je matice, b R m,1 je jednosloupcová matice.
[1] Terminologie [2] Soustavy lineárních rovnic vlastnosti množin řešení metody hledání řešení nejednoznačnost zápisu řešení Definice: Necht A = (a i,j ) R m,n je matice, b R m,1 je jednosloupcová matice.
Soustavy linea rnı ch rovnic
 [1] Soustavy lineárních rovnic vlastnosti množin řešení metody hledání řešení nejednoznačnost zápisu řešení a) soustavy, 10, b) P. Olšák, FEL ČVUT, c) P. Olšák 2010, d) BI-LIN, e) L, f) 2009/2010, g)l.
[1] Soustavy lineárních rovnic vlastnosti množin řešení metody hledání řešení nejednoznačnost zápisu řešení a) soustavy, 10, b) P. Olšák, FEL ČVUT, c) P. Olšák 2010, d) BI-LIN, e) L, f) 2009/2010, g)l.
INŽENÝRSKÁ MATEMATIKA DIFERENCIÁLNÍ ROVNICE 2
 INŽENÝRSKÁ MATEMATIKA DIFERENCIÁLNÍ ROVNICE 2 Robert Mařík 5. října 2009 c Robert Mařík, 2009 Obsah 1 LDR druhého řádu 4 2 Homogenní LDR, lineární nezávislost a wronskián 9 3 Homogenní LDR s konstantními
INŽENÝRSKÁ MATEMATIKA DIFERENCIÁLNÍ ROVNICE 2 Robert Mařík 5. října 2009 c Robert Mařík, 2009 Obsah 1 LDR druhého řádu 4 2 Homogenní LDR, lineární nezávislost a wronskián 9 3 Homogenní LDR s konstantními
I. Diferenciální rovnice. 3. Rovnici y = x+y+1. převeďte vhodnou transformací na rovnici homogenní (vzniklou
 Typy příkladů pro I. část písemky ke zkoušce z MA II I. Diferenciální rovnice. 1. Určete obecné řešení rovnice y = y sin x.. Určete řešení rovnice y = y x splňující počáteční podmínku y(1) = 0. 3. Rovnici
Typy příkladů pro I. část písemky ke zkoušce z MA II I. Diferenciální rovnice. 1. Určete obecné řešení rovnice y = y sin x.. Určete řešení rovnice y = y x splňující počáteční podmínku y(1) = 0. 3. Rovnici
Řešení rekurentních rovnic 2. Základy diskrétní matematiky, BI-ZDM ZS 2011/12, Lekce 11
 Řešení rekurentních rovnic 2 doc. RNDr. Josef Kolář, CSc. Katedra teoretické informatiky FIT České vysoké učení technické v Praze c Josef Kolar, 2011 Základy diskrétní matematiky, BI-ZDM ZS 2011/12, Lekce
Řešení rekurentních rovnic 2 doc. RNDr. Josef Kolář, CSc. Katedra teoretické informatiky FIT České vysoké učení technické v Praze c Josef Kolar, 2011 Základy diskrétní matematiky, BI-ZDM ZS 2011/12, Lekce
Vlastní čísla a vlastní vektory
 Kapitola 15 Vlastní čísla a vlastní vektory V této a následujících kapitolách budeme zkoumat jeden z nejdůležitějších pojmů tohoto kurzu. Definice15.1 Buď A:V Vlineárnízobrazení,Vvektorovýprostornad tělesem
Kapitola 15 Vlastní čísla a vlastní vektory V této a následujících kapitolách budeme zkoumat jeden z nejdůležitějších pojmů tohoto kurzu. Definice15.1 Buď A:V Vlineárnízobrazení,Vvektorovýprostornad tělesem
Kapitola 10: Diferenciální rovnice 1/14
 Kapitola 10: Diferenciální rovnice 1/14 Co je to diferenciální rovnice? Definice: Diferenciální rovnice je vztah mezi hledanou funkcí y(x), jejími derivacemi y (x), y (x), y (x),... a nezávisle proměnnou
Kapitola 10: Diferenciální rovnice 1/14 Co je to diferenciální rovnice? Definice: Diferenciální rovnice je vztah mezi hledanou funkcí y(x), jejími derivacemi y (x), y (x), y (x),... a nezávisle proměnnou
Operace s maticemi. 19. února 2018
 Operace s maticemi Přednáška druhá 19. února 2018 Obsah 1 Operace s maticemi 2 Hodnost matice (opakování) 3 Regulární matice 4 Inverzní matice 5 Determinant matice Matice Definice (Matice). Reálná matice
Operace s maticemi Přednáška druhá 19. února 2018 Obsah 1 Operace s maticemi 2 Hodnost matice (opakování) 3 Regulární matice 4 Inverzní matice 5 Determinant matice Matice Definice (Matice). Reálná matice
Obyčejnými diferenciálními rovnicemi (ODR) budeme nazývat rovnice, ve kterých
 budeme nazývat rovnice, ve kterých") Obyčejné diferenciální rovnice Obyčejnými diferenciálními rovnicemi (ODR) budeme nazývat rovnice, ve kterých se vyskytují derivace neznámé funkce jedné reálné proměnné. Příklad. Bud dána funkce f : R R.
Obyčejné diferenciální rovnice Obyčejnými diferenciálními rovnicemi (ODR) budeme nazývat rovnice, ve kterých se vyskytují derivace neznámé funkce jedné reálné proměnné. Příklad. Bud dána funkce f : R R.
Drsná matematika III 1. přednáška Funkce více proměnných: křivky, směrové derivace, diferenciál
 Drsná matematika III 1. přednáška Funkce více proměnných: křivky, směrové derivace, diferenciál Jan Slovák Masarykova univerzita Fakulta informatiky 16. 9. 2008 Obsah přednášky 1 Literatura 2 Funkce a
Drsná matematika III 1. přednáška Funkce více proměnných: křivky, směrové derivace, diferenciál Jan Slovák Masarykova univerzita Fakulta informatiky 16. 9. 2008 Obsah přednášky 1 Literatura 2 Funkce a
Co jsme udělali: Au = f, u D(A)
") Předmět: MA4 Dnešní látka: Od okrajových úloh v 1D k o. ú. ve 2D Laplaceův diferenciální operátor Variačně formulované okrajové úlohy pro parciální diferenciální rovnice a metody jejich přibližného řešení
Předmět: MA4 Dnešní látka: Od okrajových úloh v 1D k o. ú. ve 2D Laplaceův diferenciální operátor Variačně formulované okrajové úlohy pro parciální diferenciální rovnice a metody jejich přibližného řešení
Úvodní informace. 17. února 2018
 Úvodní informace Funkce více proměnných Přednáška první 17. února 2018 Obsah 1 Úvodní informace. 2 Funkce více proměnných Definiční obor Limita a spojitost Derivace, diferencovatelnost, diferenciál Úvodní
Úvodní informace Funkce více proměnných Přednáška první 17. února 2018 Obsah 1 Úvodní informace. 2 Funkce více proměnných Definiční obor Limita a spojitost Derivace, diferencovatelnost, diferenciál Úvodní
9. Vícerozměrná integrace
 9. Vícerozměrná integrace Tomáš Salač Ú UK, FF UK LS 2017/18 Tomáš Salač ( Ú UK, FF UK ) 9. Vícerozměrná integrace LS 2017/18 1 / 29 9.1 Elementy teorie míry Poznámka Na R n definujeme systém tzv. měřitelných
9. Vícerozměrná integrace Tomáš Salač Ú UK, FF UK LS 2017/18 Tomáš Salač ( Ú UK, FF UK ) 9. Vícerozměrná integrace LS 2017/18 1 / 29 9.1 Elementy teorie míry Poznámka Na R n definujeme systém tzv. měřitelných
2.6. Vlastní čísla a vlastní vektory matice
 26 Cíle V této části se budeme zabývat hledáním čísla λ které je řešením rovnice A x = λ x (1) kde A je matice řádu n Znalost řešení takové rovnice má řadu aplikací nejen v matematice Definice 261 Nechť
26 Cíle V této části se budeme zabývat hledáním čísla λ které je řešením rovnice A x = λ x (1) kde A je matice řádu n Znalost řešení takové rovnice má řadu aplikací nejen v matematice Definice 261 Nechť
1 Modelování systémů 2. řádu
 OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
OBSAH Obsah 1 Modelování systémů 2. řádu 1 2 Řešení diferenciální rovnice 3 3 Ukázka řešení č. 1 9 4 Ukázka řešení č. 2 11 5 Ukázka řešení č. 3 12 6 Ukázka řešení č. 4 14 7 Ukázka řešení č. 5 16 8 Ukázka
Matematika III. Miroslava Dubcová, Daniel Turzík, Drahoslava Janovská. Ústav matematiky
 Matematika III Řady Miroslava Dubcová, Daniel Turzík, Drahoslava Janovská Ústav matematiky Přednášky ZS 202-203 Obsah Číselné řady. Součet nekonečné řady. Kritéria konvergence 2 Funkční řady. Bodová konvergence.
Matematika III Řady Miroslava Dubcová, Daniel Turzík, Drahoslava Janovská Ústav matematiky Přednášky ZS 202-203 Obsah Číselné řady. Součet nekonečné řady. Kritéria konvergence 2 Funkční řady. Bodová konvergence.
15 Maticový a vektorový počet II
 M. Rokyta, MFF UK: Aplikovaná matematika III kap. 15: Maticový a vektorový počet II 1 15 Maticový a vektorový počet II 15.1 Úvod Opakování z 1. ročníku (z kapitoly 8) Označení. Množinu všech reálných resp.
M. Rokyta, MFF UK: Aplikovaná matematika III kap. 15: Maticový a vektorový počet II 1 15 Maticový a vektorový počet II 15.1 Úvod Opakování z 1. ročníku (z kapitoly 8) Označení. Množinu všech reálných resp.
Lineární algebra : Vlastní čísla, vektory a diagonalizace
 Lineární algebra : Vlastní čísla, vektory a diagonalizace (14. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 21. dubna 2014, 19:37 1 2 14.1 Vlastní čísla a vlastní vektory Nechť je
Lineární algebra : Vlastní čísla, vektory a diagonalizace (14. přednáška) František Štampach, Karel Klouda LS 2013/2014 vytvořeno: 21. dubna 2014, 19:37 1 2 14.1 Vlastní čísla a vlastní vektory Nechť je
9. přednáška 26. listopadu f(a)h < 0 a pro h (0, δ) máme f(a 1 + h, a 2,..., a m ) f(a) > 1 2 x 1
h < 0 a pro h (0, δ) máme f(a 1 + h, a 2,..., a m ) f(a) > 1 2 x 1") 9 přednáška 6 listopadu 007 Věta 11 Nechť f C U, kde U R m je otevřená množina, a a U je bod Pokud fa 0, nemá f v a ani neostrý lokální extrém Pokud fa = 0 a H f a je pozitivně negativně definitní, potom
9 přednáška 6 listopadu 007 Věta 11 Nechť f C U, kde U R m je otevřená množina, a a U je bod Pokud fa 0, nemá f v a ani neostrý lokální extrém Pokud fa = 0 a H f a je pozitivně negativně definitní, potom
INŽENÝRSKÁ MATEMATIKA DIFERENCIÁLNÍ ROVNICE
 INŽENÝRSKÁ MATEMATIKA DIFERENCIÁLNÍ ROVNICE Robert Mařík Ústav matematiky, LDF, MZLU 5. patro, budova B marik@mendelu.cz www.mendelu.cz/user/marik c Robert Mařík, 2009 Obsah 1 Diferenciální rovnice úvod
INŽENÝRSKÁ MATEMATIKA DIFERENCIÁLNÍ ROVNICE Robert Mařík Ústav matematiky, LDF, MZLU 5. patro, budova B marik@mendelu.cz www.mendelu.cz/user/marik c Robert Mařík, 2009 Obsah 1 Diferenciální rovnice úvod
Základy matematické analýzy
 Základy matematické analýzy Spojitost funkce Ing. Tomáš Kalvoda, Ph.D. 1, Ing. Daniel Vašata 2 1 tomas.kalvoda@fit.cvut.cz 2 daniel.vasata@fit.cvut.cz Katedra aplikované matematiky Fakulta informačních
Základy matematické analýzy Spojitost funkce Ing. Tomáš Kalvoda, Ph.D. 1, Ing. Daniel Vašata 2 1 tomas.kalvoda@fit.cvut.cz 2 daniel.vasata@fit.cvut.cz Katedra aplikované matematiky Fakulta informačních
1 Posloupnosti a řady.
 1 Posloupnosti a řady. 1.1 Posloupnosti reálných čísel. Definice 1.1: Posloupností reálných čísel nazýváme zobrazení f množiny N všech přirozených čísel do množiny R všech reálných čísel. Pokud nemůže
1 Posloupnosti a řady. 1.1 Posloupnosti reálných čísel. Definice 1.1: Posloupností reálných čísel nazýváme zobrazení f množiny N všech přirozených čísel do množiny R všech reálných čísel. Pokud nemůže
Soustavy lineárních diferenciálních rovnic I. řádu s konstantními koeficienty
 Soustavy lineárních diferenciálních rovnic I řádu s konstantními koeficienty Definice a) Soustava tvaru x = ax + a y + az + f() t y = ax + a y + az + f () t z = a x + a y + a z + f () t se nazývá soustava
Soustavy lineárních diferenciálních rovnic I řádu s konstantními koeficienty Definice a) Soustava tvaru x = ax + a y + az + f() t y = ax + a y + az + f () t z = a x + a y + a z + f () t se nazývá soustava
Matematika B101MA1, B101MA2
 Matematika B101MA1, B101MA2 Zařazení předmětu: povinný předmět 1.ročníku bc studia 2 semestry Rozsah předmětu: prezenční studium 2 + 2 kombinované studium 16 + 0 / semestr Zakončení předmětu: ZS zápočet
Matematika B101MA1, B101MA2 Zařazení předmětu: povinný předmět 1.ročníku bc studia 2 semestry Rozsah předmětu: prezenční studium 2 + 2 kombinované studium 16 + 0 / semestr Zakončení předmětu: ZS zápočet
Posloupnosti a řady. 28. listopadu 2015
 Posloupnosti a řady Přednáška 5 28. listopadu 205 Obsah Posloupnosti 2 Věty o limitách 3 Řady 4 Kritéria konvergence 5 Absolutní a relativní konvergence 6 Operace s řadami 7 Mocninné a Taylorovy řady Zdroj
Posloupnosti a řady Přednáška 5 28. listopadu 205 Obsah Posloupnosti 2 Věty o limitách 3 Řady 4 Kritéria konvergence 5 Absolutní a relativní konvergence 6 Operace s řadami 7 Mocninné a Taylorovy řady Zdroj
5. Aplikace diferenciálního a integrálního po tu v jedné dimenzi ZS 2017/18 1 / 32
 5. Aplikace diferenciálního a integrálního po tu v jedné dimenzi Tomá² Sala MÚ UK, MFF UK ZS 2017/18 5. Aplikace diferenciálního a integrálního po tu v jedné dimenzi ZS 2017/18 1 / 32 5.1 Funkce spojité
5. Aplikace diferenciálního a integrálního po tu v jedné dimenzi Tomá² Sala MÚ UK, MFF UK ZS 2017/18 5. Aplikace diferenciálního a integrálního po tu v jedné dimenzi ZS 2017/18 1 / 32 5.1 Funkce spojité
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY
 VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
Aplikovaná matematika III (NMAF073) ZS 2011/12
 ZS 2011/12") Aplikovaná matematika III (NMAF73) Mirko Rokyta (KMA MFF UK) ZS 211/12 15 Maticový a vektorový počet II 1 15.1 Úvod 1 15.2 Vlastní čísla a vlastní vektory 3 15.3 Lineární zobrazení v prostorech se skalárním
Aplikovaná matematika III (NMAF73) Mirko Rokyta (KMA MFF UK) ZS 211/12 15 Maticový a vektorový počet II 1 15.1 Úvod 1 15.2 Vlastní čísla a vlastní vektory 3 15.3 Lineární zobrazení v prostorech se skalárním
Úlohy k přednášce NMAG 101 a 120: Lineární algebra a geometrie 1 a 2,
 Úlohy k přednášce NMAG a : Lineární algebra a geometrie a Verze ze dne. května Toto je seznam přímočarých příkladů k přednášce. Úlohy z tohoto seznamu je nezbytně nutné umět řešit. Podobné typy úloh se
Úlohy k přednášce NMAG a : Lineární algebra a geometrie a Verze ze dne. května Toto je seznam přímočarých příkladů k přednášce. Úlohy z tohoto seznamu je nezbytně nutné umět řešit. Podobné typy úloh se
Vlastní (charakteristická) čísla a vlastní (charakteristické) Pro zadanou čtvercovou matici A budeme řešit maticovou
 čísla a vlastní (charakteristické) Pro zadanou čtvercovou matici A budeme řešit maticovou") 1 Vlastní (charakteristická) čísla a vlastní (charakteristické) vektory matice Pro zadanou čtvercovou matici A budeme řešit maticovou rovnici A x = λ x, kde x je neznámá matice o jednom sloupci (sloupcový
1 Vlastní (charakteristická) čísla a vlastní (charakteristické) vektory matice Pro zadanou čtvercovou matici A budeme řešit maticovou rovnici A x = λ x, kde x je neznámá matice o jednom sloupci (sloupcový
Obsah. Lineární rovnice. Definice 7.9. a i x i = a 1 x a n x n = b,
 Obsah Lineární rovnice Definice 77 Uvažujme číselné těleso T a prvky a 1,, a n, b T Úloha určit všechny n-tice (x 1,, x n ) T n, pro něž platí n a i x i = a 1 x 1 + + a n x n = b, i=1 se nazývá lineární
Obsah Lineární rovnice Definice 77 Uvažujme číselné těleso T a prvky a 1,, a n, b T Úloha určit všechny n-tice (x 1,, x n ) T n, pro něž platí n a i x i = a 1 x 1 + + a n x n = b, i=1 se nazývá lineární
MATEMATIKA III. Olga Majlingová. Učební text pro prezenční studium. Předběžná verze
 Fakulta strojního inženýrství Univerzity J. E. Purkyně v Ústí nad Labem Pasteurova 7 Tel.: 475 285 511 400 96 Ústí nad Labem Fax: 475 285 566 Internet: www.ujep.cz E-mail: kontakt@ujep.cz MATEMATIKA III
Fakulta strojního inženýrství Univerzity J. E. Purkyně v Ústí nad Labem Pasteurova 7 Tel.: 475 285 511 400 96 Ústí nad Labem Fax: 475 285 566 Internet: www.ujep.cz E-mail: kontakt@ujep.cz MATEMATIKA III
maticeteorie 1. Matice A je typu 2 4, matice B je typu 4 3. Jakých rozměrů musí být matice X, aby se dala provést
 Úlohy k zamyšlení 1. Zdůvodněte, proč třetí řádek Hornerova schématu pro vyhodnocení polynomu p v bodě c obsahuje koeficienty polynomu r, pro který platí p(x) = (x c) r(x) + p(c). 2. Dokažte, že pokud
Úlohy k zamyšlení 1. Zdůvodněte, proč třetí řádek Hornerova schématu pro vyhodnocení polynomu p v bodě c obsahuje koeficienty polynomu r, pro který platí p(x) = (x c) r(x) + p(c). 2. Dokažte, že pokud
1 Determinanty a inverzní matice
 Determinanty a inverzní matice Definice Necht A = (a ij ) je matice typu (n, n), n 2 Subdeterminantem A ij matice A příslušným pozici (i, j) nazýváme determinant matice, která vznikne z A vypuštěním i-tého
Determinanty a inverzní matice Definice Necht A = (a ij ) je matice typu (n, n), n 2 Subdeterminantem A ij matice A příslušným pozici (i, j) nazýváme determinant matice, která vznikne z A vypuštěním i-tého
8.3). S ohledem na jednoduchost a názornost je výhodné seznámit se s touto Základní pojmy a vztahy. Definice
. S ohledem na jednoduchost a názornost je výhodné seznámit se s touto Základní pojmy a vztahy. Definice") 9. Lineární diferenciální rovnice 2. řádu Cíle Diferenciální rovnice, v nichž hledaná funkce vystupuje ve druhé či vyšší derivaci, nazýváme diferenciálními rovnicemi druhého a vyššího řádu. Analogicky
9. Lineární diferenciální rovnice 2. řádu Cíle Diferenciální rovnice, v nichž hledaná funkce vystupuje ve druhé či vyšší derivaci, nazýváme diferenciálními rovnicemi druhého a vyššího řádu. Analogicky
Texty k přednáškám z MMAN3: 4. Funkce a zobrazení v euklidovských prostorech
 Texty k přednáškám z MMAN3: 4. Funkce a zobrazení v euklidovských prostorech 1. července 2008 1 Funkce v R n Definice 1 Necht n N a D R n. Reálnou funkcí v R n (reálnou funkcí n proměnných) rozumíme zobrazení
Texty k přednáškám z MMAN3: 4. Funkce a zobrazení v euklidovských prostorech 1. července 2008 1 Funkce v R n Definice 1 Necht n N a D R n. Reálnou funkcí v R n (reálnou funkcí n proměnných) rozumíme zobrazení
1. Obyčejné diferenciální rovnice
 & 8..8 8: Josef Hekrdla obyčejné diferenciální rovnice-separace proměnných. Obyčejné diferenciální rovnice Rovnice, ve které je neznámá funkcí a v rovnici se vyskytuje spolu se svými derivacemi, se nazývá
& 8..8 8: Josef Hekrdla obyčejné diferenciální rovnice-separace proměnných. Obyčejné diferenciální rovnice Rovnice, ve které je neznámá funkcí a v rovnici se vyskytuje spolu se svými derivacemi, se nazývá
Vlastní čísla a vlastní vektory
 5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
5 Vlastní čísla a vlastní vektor Poznámka: Je-li A : V V lineární zobrazení z prostoru V do prostoru V někd se takové zobrazení nazývá lineárním operátorem, pak je přirozeným požadavkem najít takovou bázi
1 Množiny, výroky a číselné obory
 1 Množiny, výroky a číselné obory 1.1 Množiny a množinové operace Množinou rozumíme každé shrnutí určitých a navzájem různých objektů (které nazýváme prvky) do jediného celku. Definice. Dvě množiny jsou
1 Množiny, výroky a číselné obory 1.1 Množiny a množinové operace Množinou rozumíme každé shrnutí určitých a navzájem různých objektů (které nazýváme prvky) do jediného celku. Definice. Dvě množiny jsou
2.6. VLASTNÍ ČÍSLA A VEKTORY MATIC
 .6. VLASTNÍ ČÍSLA A VEKTORY MATIC V této kapitole se dozvíte: jak jsou definována vlastní (charakteristická) čísla a vektory čtvercové matice; co je to charakteristická matice a charakteristický polynom
.6. VLASTNÍ ČÍSLA A VEKTORY MATIC V této kapitole se dozvíte: jak jsou definována vlastní (charakteristická) čísla a vektory čtvercové matice; co je to charakteristická matice a charakteristický polynom
Učební texty k státní bakalářské zkoušce Matematika Skalární součin. študenti MFF 15. augusta 2008
 Učební texty k státní bakalářské zkoušce Matematika Skalární součin študenti MFF 15. augusta 2008 1 10 Skalární součin Požadavky Vlastnosti v reálném i komplexním případě Norma Cauchy-Schwarzova nerovnost
Učební texty k státní bakalářské zkoušce Matematika Skalární součin študenti MFF 15. augusta 2008 1 10 Skalární součin Požadavky Vlastnosti v reálném i komplexním případě Norma Cauchy-Schwarzova nerovnost