Analýza a zpracování signálů. 5. Z-transformace
|
|
|
- Štěpán Dominik Vítek
- před 8 lety
- Počet zobrazení:
Transkript
1 nalýa a pracování signálů 5. Z-transformace
2 Z-tranformace je mocný nástroj použitelný pro analýu lineárních discretetime systémů Oboustranná Z-transformace X j F j x, je omplexní číslo r e r e Oboustranná transformace onečné řady je výonová Laurentova řada proměnné. Hodnoty se reslí v tv. rgandově diagramu -rovina Společně s hodnotou X se uvádí i oblast, pro terou X onverguje tv. oblast onvergence ROC region of convergence. Pro dvě odlišné řady může existovat stejná Z-transformace, ale s odlišnou oblastí onvergence, proto je nutné oblast onvergence uvádět. Poud se ROC neuvádí uvažuje se obvyle pravostranný signál.

3 Pro ROC platí následující pravidla : signál onečné dély ROC X je celá rovina, romě =0 popř. = pravostranný x[n] ROC X je vně ružnice s poloměrem větším, než je veliost v absolutní hodnotě největšího pólu levostranný signál ROC X je vnitře ružnice s poloměrem menším, než v absolutní hodnotě veliost nejmenšího pólu oboustranný signál ROC X je uvnitř meiruží ohraničeného největším a nejmenším pólem v absolutní hodnotě
4 Vlastnosti oboustranné Z-transformace


5 Převod signálu do Z oblasti: pro signály onečné dély polynomem proměnné pro ostatní signály - převodní tabula.
6 Z-rovina, nuly, póly Z- transformace le u většiny signálů vyjádřit jao racionální lomenou funci, terá má tvar: 0 0 B B B B D X M M M M Onačme: ořeny jao i nuly O ořeny D jao p póly X M p p p D K X
7 Diagram nul a pólů H
8 Přílad : Jaá -transformace odpovídá následujícímu diagramu nul a pólů?
9 Přenosová funce systému Odeva systému y[n] s impulní odevou h[n] je dána onvolucí ] [ ] [ ] [ n h n x n y v Z oblasti ] [ ] [ ] [ ] [ X Y H H X Y
10 LTI systém může být popsán: přenosovou funcí impulní odevou diferenční rovnicí diagramem nul a pólů H[] je přenosová funce systému a je definována poue pro ustálený LTI systém jao poměr Z-transformace výstupu Z-transformaci vstupu. H je Z-transformace impulní odevy h[n] M M B B B X Y H 0 0
11 Kaualita a stabilita LTI systému V časové oblasti - auální systém má impulní odevu h[n]=0, pro n<0. Pro impulní odevu tohoto systému pa platí, že počet nul nesmí přesáhnout počet pólů stupeň čitatele musí být menší než stupeň jmenovatele. Stabilita Bounded Input Bounded Output na omeený vstup reaguje systém omeeným výstupem. ROC oblast onvergence stabilního LTI systému vždy ahrnuje jednotovou ružnici a platí: stabilní a auální systém: - všechny póly leží uvnitř jednotové ružnice stabilní a antiauální systém všechny póly leží vně jednotové ružnice
12 Spojování systémů Kasádní spojení: X[] Y [] H [] H [] Y[] Y[]=H []Y []=H []H []X[] =H [] H []X[] H[]=H [] H [] Obecně pro n asádně spojených systémů : H[]=H [] H [] H n [] Paralelní spojení: X[] H [] Y Y[] H [] Y Y[]=H []X[]+ H []X[] = H []+H []X[] H[]=H []+H [] Obecně pro n paralelně spojených systémů : H[]=H [] + H [] + +H n []
13 Realiace přenosové funce
14 Pro obecnou diferenční rovnici:
15 Duální strutura filtru Transposed realiation Vycháí přímé formy II a provede se přelopením áměna vstupů a výstupů, otočení tou signálu a áměna sumátorů a spoje.
16 Sériová asádní realiace filtrů Přenosová funce systému může být buˇvýsledem součinu dílčích přenosových funcí v asádním apojení Systém -tého řádu může být realiován jao asádní spojení systémů. rádu a. řádu poud je liché
17 Paralelní realiace filtrů Přenosová funce systému může být buˇvýsledem součtu dílčích přenosových funcí v paralelním apojení Přenosovou funci systému -tého řádu můžeme roložit na parciální lomy a realiovat systém jao paralelní spojení subsystémů. popř.. řádu.
18 Přílad:. aleněte asádní realiaci filtru popsaného přenosovou funcí H. aleněte asádní realiaci filtru popsaného přenosovou funcí 0.5 H
19 Obecně: Inverní Z-transformace x n X[ ] n d V praxi se obecný vorec téměř nepoužívá a inverní transformace se určuje ombinací následujících působů :. přímý převod. dělení polynomů 3. rolad na parciální lomy. Přímý převod: - pro jednoduché případy, dy je Z- transformace vyjádřena onečnou řadou. X[]= x[n]=3[n-] + 5 [n-3] + [n-4] x[n]={0, 3, 0, 5, } ebo X[]= x[n]=[n+] - 5 [n+] + 5 [n-] - [n-] x[n]={, -5, 0, 3, 5, - }
20 Dělení polynomů: Většinou se používá poud chceme vyjádřit poue prvních pár členů odevy systému - je to obvyle rychlejší než rolad na parciální lomy. Předpoládejme, že : X D pro pravostranný signál: uspořádáme a D podle sestupných mocnin a určíme výslede dělení polynomů dostaneme mocninou řadu proměnné - pro levostranný signál: uspořádáme a D podle vestupných mocnin dostaneme mocninnou řadu proměnné H[ ] 4-4 : -+ = h[n]= [n-] - 3[n-] - 4[n-3] h[n]={0,,-3,-4, }
21 Rolad na parciální lomy : - princip metody roladu spočívá v tom, že výra pro Z-transformaci se roloží na součet lomů, jejichž inverní transformaci le najít v tabulách. - rolad se provádí v ávislosti na pólech tj. ořenech jmenovatele. Rolišujeme případy:. Rodílné póly- reálné p m m m Y p de p p p p p p P X Y Rodílné póly - omplexní r r r r p p X Y
22 . Opaující se póly - Y obsahuje +r pól r n n n r r Y r d d n Y r d d Y r de r r r X Y!, 0 0
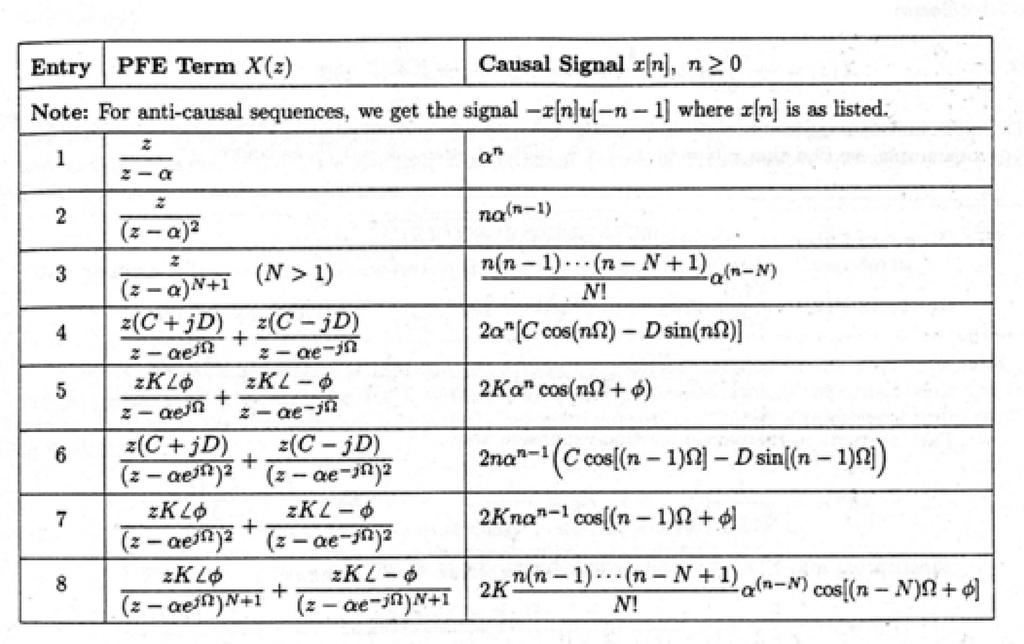
23 Zpětná Z-transformace tabula

24 Zpětná Z-transformace rolad na parciální lomy
25 Jednostranná Z-transformace používá se při analýe auálních systémů a je definována následujícím vtahem 0, x X Vlastnosti jednostranné Z-transformace jsou podobné jao u oboustranné, jsou poue upravené pro práci s auálními signály. ] [ ] [ [0] ] [ ] [ ] [ ] [ ] [ ] [ y y y Y n y y y Y n y y Y n y Posun doprava:
26 Posun doleva: y[ n ] Y y[0] y[ n ] Y y[0] y[] y[ n ] Y y[0] y[] y[ ] Periodicý signál: x p X [ n] u[ n] X de x [n] je první perioda signálu x p [n] Věta o počáteční hodnotě: Věta o oncové hodnotě: x[ 0] lim X lim x[ n] n lim X
27 Využití Z-transformace analýe systémů Systémy popsané diferenční rovnicí:. převod diferenční rovnice do Z oblasti s ohledem na vlastnosti posuvu u jednostranné Z transformace a počáteční podmíny. výpočet ZIR, ZSR a celové odevy 3. pětná transformace Přílad. Řešte diferenční rovnici a určete ZIR, ZSR y[n]-0.5y[n-] = 0.5nu[n] pro y[-]= -
28 Systémy popsané přenosovou funcí:. určení ZSR: Z přenosové funce určit Y=XH a provést pětnou tranformaci. určení ZIR: určit diferenční rovnici, převést a postupovat jao u systémů popsaných diferenční rovnicí. Přílad : Pro adanou přenosovou funci H, vstup x[n]=4u[n] a počáteční podmíny y[-]=0 a y[-]=, určete ZIR, ZSR, homogenní a partiulární řešení. H 6 6
29
Analýza a zpracování signálů. 5. Z-transformace
 Analýa a pracování signálů 5. Z-transformace Z-tranformace je mocný nástroj použitelný pro analýu lineárních discretetime systémů Oboustranná Z-transformace X k jf j xk, je komplexní číslo r e r e k Oboustranná
Analýa a pracování signálů 5. Z-transformace Z-tranformace je mocný nástroj použitelný pro analýu lineárních discretetime systémů Oboustranná Z-transformace X k jf j xk, je komplexní číslo r e r e k Oboustranná
Z transformace. Definice. Z transformací komplexní posloupnosti f = { } f n z n, (1)
") Z transformace Definice Z transformací komplexní posloupnosti f = { roumíme funkci F ( definovanou vtahem F ( = n, ( pokud řada vpravo konverguje aspoň v jednom bodě 0 C Náev Z transformace budeme také
Z transformace Definice Z transformací komplexní posloupnosti f = { roumíme funkci F ( definovanou vtahem F ( = n, ( pokud řada vpravo konverguje aspoň v jednom bodě 0 C Náev Z transformace budeme také
Inverzní z-transformace. prof. Miroslav Vlček. 25. dubna 2013
 Modelování systémů a procesů 25. dubna 2013 Obsah Inverzní z-transformace 1 Inverzní z-transformace 2 Obsah Inverzní z-transformace 1 Inverzní z-transformace 2 Metody výpočtu inverzní z-transformace Zpětná
Modelování systémů a procesů 25. dubna 2013 Obsah Inverzní z-transformace 1 Inverzní z-transformace 2 Obsah Inverzní z-transformace 1 Inverzní z-transformace 2 Metody výpočtu inverzní z-transformace Zpětná
MATEMATIKA II V PŘÍKLADECH
 VYSOKÁ ŠKOL BÁŇSKÁ TECHICKÁ UIVERZIT OSTRV FKULT STROJÍ MTEMTIK II V PŘÍKLDECH CVIČEÍ Č 0 Ing Petra Schreiberová, PhD Ostrava 0 Ing Petra Schreiberová, PhD Vysoá šola báňsá Technicá univerzita Ostrava
VYSOKÁ ŠKOL BÁŇSKÁ TECHICKÁ UIVERZIT OSTRV FKULT STROJÍ MTEMTIK II V PŘÍKLDECH CVIČEÍ Č 0 Ing Petra Schreiberová, PhD Ostrava 0 Ing Petra Schreiberová, PhD Vysoá šola báňsá Technicá univerzita Ostrava
Diskretizace. 29. dubna 2015
 MSP: Domácí příprava č. 3 Vnitřní a vnější popis diskrétních systémů Dopředná Z-transformace Zpětná Z-transformace Řešení diferenčních rovnic Stabilita diskrétních systémů Spojování systémů Diskretizace
MSP: Domácí příprava č. 3 Vnitřní a vnější popis diskrétních systémů Dopředná Z-transformace Zpětná Z-transformace Řešení diferenčních rovnic Stabilita diskrétních systémů Spojování systémů Diskretizace
f (k) (x 0 ) (x x 0 ) k, x (x 0 r, x 0 + r). k! f(x) = k=1 Řada se nazývá Taylorovou řadou funkce f v bodě x 0. Přehled některých Taylorových řad.
 (x 0 ) (x x 0 ) k, x (x 0 r, x 0 + r). k! f(x) = k=1 Řada se nazývá Taylorovou řadou funkce f v bodě x 0. Přehled některých Taylorových řad.") 8. Taylorova řada. V urzu matematiy jsme uázali, že je možné funci f, terá má v oolí bodu x derivace aproximovat polynomem, jehož derivace se shodují s derivacemi aproximované funce v bodě x. Poud má funce
8. Taylorova řada. V urzu matematiy jsme uázali, že je možné funci f, terá má v oolí bodu x derivace aproximovat polynomem, jehož derivace se shodují s derivacemi aproximované funce v bodě x. Poud má funce
Úlohy domácího kola kategorie B
 54. roční Matematicé olympiády Úlohy domácího ola ategorie 1. Určete všechny dvojice (a, b) reálných čísel, pro teré má aždá rovnic x + ax + b 0, x + (a + 1)x + b + 1 0 dva růné reálné ořeny, přičemž ořeny
54. roční Matematicé olympiády Úlohy domácího ola ategorie 1. Určete všechny dvojice (a, b) reálných čísel, pro teré má aždá rovnic x + ax + b 0, x + (a + 1)x + b + 1 0 dva růné reálné ořeny, přičemž ořeny
β 180 α úhel ve stupních β úhel v radiánech β = GONIOMETRIE = = 7π 6 5π 6 3 3π 2 π 11π 6 Velikost úhlu v obloukové a stupňové míře: Stupňová míra:
 GONIOMETRIE Veliost úhlu v oblouové a stupňové míře: Stupňová míra: Jednota (stupeň) 60 600 jeden stupeň 60 minut 600 vteřin Př. 5,4 5 4 0,4 0,4 60 4 Oblouová míra: Jednota radián radián je veliost taového
GONIOMETRIE Veliost úhlu v oblouové a stupňové míře: Stupňová míra: Jednota (stupeň) 60 600 jeden stupeň 60 minut 600 vteřin Př. 5,4 5 4 0,4 0,4 60 4 Oblouová míra: Jednota radián radián je veliost taového
a) formulujte Weierstrassovo kritérium stejnoměrné konvergence b) pomocí tohoto kritéria ukažte, že funkční řada konverguje stejnoměrně na celé R
 formulujte Weierstrassovo kritérium stejnoměrné konvergence b) pomocí tohoto kritéria ukažte, že funkční řada konverguje stejnoměrně na celé R") ) ČÍSELNÉ A FUNKČNÍ ŘADY (5b) a) formulujte Leibnitzovo ritérium včetně absolutní onvergence b) apliujte toto ritérium na řadu a) formulujte podílové ritérium b) posuďte onvergenci řad c) oli členů této
) ČÍSELNÉ A FUNKČNÍ ŘADY (5b) a) formulujte Leibnitzovo ritérium včetně absolutní onvergence b) apliujte toto ritérium na řadu a) formulujte podílové ritérium b) posuďte onvergenci řad c) oli členů této
Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace 22.z-3.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ druhá část tématu předmětu pokračuje. oblastí matematických pomůcek
Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace 22.z-3.tr ZS 2015/2016 2015 - Ing. Václav Rada, CSc. TEORIE ŘÍZENÍ druhá část tématu předmětu pokračuje. oblastí matematických pomůcek
4 všechny koeficienty jsou záporné, nedochází k žádné změně. Rovnice tedy záporné reálné kořeny nemá.
 Přílad 1. Řešte v R rovnici x 4x + x 4 0. Výslede vypočtěte s přesností alespoň 0,07. 1) Reálné ořeny rovnice budou ležet v intervalu ( 5,5), protože největší z oeficientů polynomu bez ohledu na znaméno
Přílad 1. Řešte v R rovnici x 4x + x 4 0. Výslede vypočtěte s přesností alespoň 0,07. 1) Reálné ořeny rovnice budou ležet v intervalu ( 5,5), protože největší z oeficientů polynomu bez ohledu na znaméno
Předpoklady: a, b spojité na intervalu I.
 Diferenciální rovnice Obyčejná diferenciální rovnice řádu n: F t, x, x, x,, x n Řešení na intervalu I: funce x : I R taová, že pro aždé t I je F t, xt, x t,, x n t Maximální řešení: neexistuje řešení na
Diferenciální rovnice Obyčejná diferenciální rovnice řádu n: F t, x, x, x,, x n Řešení na intervalu I: funce x : I R taová, že pro aždé t I je F t, xt, x t,, x n t Maximální řešení: neexistuje řešení na
3. Mocninné a Taylorovy řady
 3. Mocninné a Taylorovy řady A. Záladní pojmy. Obor onvergence Mocninné řady jsou nejjednodušším speciálním případem funčních řad. Jsou to funční řady, jejichž členy jsou mocninné funce. V této apitole
3. Mocninné a Taylorovy řady A. Záladní pojmy. Obor onvergence Mocninné řady jsou nejjednodušším speciálním případem funčních řad. Jsou to funční řady, jejichž členy jsou mocninné funce. V této apitole
Příklad. Řešte v : takže rovnice v zadání má v tomto případě jedno řešení. Pro má rovnice tvar
 Řešte v : má rovnice tvar takže rovnice v zadání má v tomto případě jedno řešení. Pro má rovnice tvar takže rovnice v zadání má v tomto případě opět jedno řešení. Sjednocením obou případů dostaneme úplné
Řešte v : má rovnice tvar takže rovnice v zadání má v tomto případě jedno řešení. Pro má rovnice tvar takže rovnice v zadání má v tomto případě opět jedno řešení. Sjednocením obou případů dostaneme úplné
4. Přednáška: Kvazi-Newtonovské metody:
 4 Přednáša: Kvazi-Newtonovsé metody: Metody s proměnnou metriou, modifiace Newtonovy metody Efetivní pro menší úlohy s hustou Hessovou maticí Newtonova metoda (opaování): f aproximujeme loálně vadraticou
4 Přednáša: Kvazi-Newtonovsé metody: Metody s proměnnou metriou, modifiace Newtonovy metody Efetivní pro menší úlohy s hustou Hessovou maticí Newtonova metoda (opaování): f aproximujeme loálně vadraticou
1 Mnohočleny a algebraické rovnice
 1 Mnohočleny a algebraické rovnice 1.1 Pojem mnohočlenu (polynomu) Připomeňme, že výrazům typu a 2 x 2 + a 1 x + a 0 říkáme kvadratický trojčlen, když a 2 0. Číslům a 0, a 1, a 2 říkáme koeficienty a písmenem
1 Mnohočleny a algebraické rovnice 1.1 Pojem mnohočlenu (polynomu) Připomeňme, že výrazům typu a 2 x 2 + a 1 x + a 0 říkáme kvadratický trojčlen, když a 2 0. Číslům a 0, a 1, a 2 říkáme koeficienty a písmenem
Měření indukčností cívek
 7..00 Ṫeorie eletromagneticého pole Měření indučností cíve.......... Petr Česá, studijní supina 05 Letní semestr 000/00 . Měření indučností cíve Měření vlastní a vzájemné indučnosti válcových cíve ZAÁNÍ
7..00 Ṫeorie eletromagneticého pole Měření indučností cíve.......... Petr Česá, studijní supina 05 Letní semestr 000/00 . Měření indučností cíve Měření vlastní a vzájemné indučnosti válcových cíve ZAÁNÍ
Buckinghamův Π-teorém (viz Barenblatt, Scaling, 2003)
") Bucinghamův Π-teorém (viz Barenblatt, Scaling, 2003) Formalizace rozměrové analýzy ( výsledné jednoty na obou stranách musí souhlasit ). Rozměr fyziální veličiny Mějme nějaou třídu jednote, napřílad [(g,
Bucinghamův Π-teorém (viz Barenblatt, Scaling, 2003) Formalizace rozměrové analýzy ( výsledné jednoty na obou stranách musí souhlasit ). Rozměr fyziální veličiny Mějme nějaou třídu jednote, napřílad [(g,
Inverzní Laplaceova transformace
 Inverzní Laplaceova transformace Modelování systémů a procesů (MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 6. přednáška MSP čtvrtek 30. března
Inverzní Laplaceova transformace Modelování systémů a procesů (MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 6. přednáška MSP čtvrtek 30. března
1 Nulové body holomorfní funkce
 Nulové body holomorfní funkce Bod naýváme nulový bod funkce f), jestliže f ) =. Je-li funkce f) holomorfní v bodě, pak le funkci f) v jistém okolí bodu rovinout v Taylorovu řadu: f) = n= a n ) n, a n =
Nulové body holomorfní funkce Bod naýváme nulový bod funkce f), jestliže f ) =. Je-li funkce f) holomorfní v bodě, pak le funkci f) v jistém okolí bodu rovinout v Taylorovu řadu: f) = n= a n ) n, a n =
VYŠŠÍ ODBORNÁ ŠKOLA A STŘEDNÍ ŠKOLA SLABOPROUDÉ ELEKTROTECHNIKY Novovysočanská 48/280, Praha 9
 1. Analogové měřicí přístroje Jsou přístroje, teré slouží měření různých eletricých veličin. Např. měření proudu, napětí a výonu. Pro měření těchto veličin nejčastěji používáme tyto soustavy:magnetoeletricá,
1. Analogové měřicí přístroje Jsou přístroje, teré slouží měření různých eletricých veličin. Např. měření proudu, napětí a výonu. Pro měření těchto veličin nejčastěji používáme tyto soustavy:magnetoeletricá,
6 Impedanční přizpůsobení
 6 Impedanční přizpůsobení edení optimálně přenáší eletromagneticou energii, je-li zatěžovací impedance rovna charateristicé impedanci. Říáme, že zátěž je impedančně přizpůsobená. e stavu impedančního přizpůsobení
6 Impedanční přizpůsobení edení optimálně přenáší eletromagneticou energii, je-li zatěžovací impedance rovna charateristicé impedanci. Říáme, že zátěž je impedančně přizpůsobená. e stavu impedančního přizpůsobení
1 Polynomiální interpolace
 Polynomiální interpolace. Metoda neurčitých koeficientů Příklad.. Nalezněte polynom p co nejmenšího stupně, pro který platí p() = 0, p(2) =, p( ) = 6. Řešení. Polynom hledáme metodou neurčitých koeficientů,
Polynomiální interpolace. Metoda neurčitých koeficientů Příklad.. Nalezněte polynom p co nejmenšího stupně, pro který platí p() = 0, p(2) =, p( ) = 6. Řešení. Polynom hledáme metodou neurčitých koeficientů,
a n (z z 0 ) n, z C, (1) n=0
 n, z C, (1) n=0") Mocniné řady Nechť 0, a 0, a, a 2,... jsou konečná komplexní čísla. Pak řadu funkcí a n ( 0 ) n, C, () naýváme mocninou řadou. Číslo 0 koeficienty mocniné řady. Onačme dále: se naývá střed mocniné řady,
Mocniné řady Nechť 0, a 0, a, a 2,... jsou konečná komplexní čísla. Pak řadu funkcí a n ( 0 ) n, C, () naýváme mocninou řadou. Číslo 0 koeficienty mocniné řady. Onačme dále: se naývá střed mocniné řady,
Systé my, procesy a signály I - sbírka příkladů
 Systé my, procesy a signály I - sbíra příladů Ř EŠEÉPŘ ÍKLADY r 6 Urč ete amplitudu, opaovací periodu, opaovací mitoč et a počáteč ní fázi disrétních harmonicých signálů a) s( ) = cos π, b) s ( ) 6 = π
Systé my, procesy a signály I - sbíra příladů Ř EŠEÉPŘ ÍKLADY r 6 Urč ete amplitudu, opaovací periodu, opaovací mitoč et a počáteč ní fázi disrétních harmonicých signálů a) s( ) = cos π, b) s ( ) 6 = π
Frekvenční charakteristiky
 Frekvenční charakteristiky EO2 Přednáška Pavel Máša ÚVODEM Frekvenční charakteristiky popisují závislost poměru amplitudy výstupního ku vstupnímu napětí a jejich fázový posun v závislosti na frekvenci
Frekvenční charakteristiky EO2 Přednáška Pavel Máša ÚVODEM Frekvenční charakteristiky popisují závislost poměru amplitudy výstupního ku vstupnímu napětí a jejich fázový posun v závislosti na frekvenci
Z-TRANSFORMACE. Příklady k procvičení
 Z-TRANSFORMACE Příklady k procvičení 1 Obsah 1 Z-transformace 3 11 Příklad 3 12 Příklad 3 13 Příklad 3 2 Vlastnosti Z-transformace 4 21 Linearita 4 211 Příklad 4 22 Podobnostobrau 4 3 Konvoluce předmětů
Z-TRANSFORMACE Příklady k procvičení 1 Obsah 1 Z-transformace 3 11 Příklad 3 12 Příklad 3 13 Příklad 3 2 Vlastnosti Z-transformace 4 21 Linearita 4 211 Příklad 4 22 Podobnostobrau 4 3 Konvoluce předmětů
MĚŘENÍ MOMENTU SETRVAČNOSTI Z DOBY KYVU
 Úloha č 5 MĚŘENÍ MOMENTU SETRVAČNOSTI Z DOBY KYVU ÚKOL MĚŘENÍ: Určete moment setrvačnosti ruhové a obdélníové desy vzhledem jednotlivým osám z doby yvu Vypočtěte moment setrvačnosti ruhové a obdélníové
Úloha č 5 MĚŘENÍ MOMENTU SETRVAČNOSTI Z DOBY KYVU ÚKOL MĚŘENÍ: Určete moment setrvačnosti ruhové a obdélníové desy vzhledem jednotlivým osám z doby yvu Vypočtěte moment setrvačnosti ruhové a obdélníové
Algebraické výrazy Vypracovala: Mgr. Zuzana Kopečková
 Algebraické výrazy Vypracovala: Mgr. Zuzana Kopečková Název školy Název a číslo projektu Název modulu Obchodní akademie a Střední odborné učiliště, Veselí nad Moravou Motivace žáků ke studiu technických
Algebraické výrazy Vypracovala: Mgr. Zuzana Kopečková Název školy Název a číslo projektu Název modulu Obchodní akademie a Střední odborné učiliště, Veselí nad Moravou Motivace žáků ke studiu technických
Reciprokou funkci znáte ze základní školy pod označením nepřímá úměra.
 @091 7. Reciproá funce Reciproou funci znáte ze záladní šoly pod označením nepřímá úměra. Definice: Reciproá funce je dána předpisem ( 0 je reálné číslo) f : y R \ {0} A) Definiční obor funce: Je třeba
@091 7. Reciproá funce Reciproou funci znáte ze záladní šoly pod označením nepřímá úměra. Definice: Reciproá funce je dána předpisem ( 0 je reálné číslo) f : y R \ {0} A) Definiční obor funce: Je třeba
MKI Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0.
 má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0.") MKI -00 Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0. V jakém rozmezí se může pohybovat poloměr konvergence regulární
MKI -00 Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0. V jakém rozmezí se může pohybovat poloměr konvergence regulární
Příklady: - počet členů dané domácnosti - počet zákazníků ve frontě - počet pokusů do padnutí čísla šest - životnost televizoru - věk člověka
 Náhodná veličina Náhodnou veličinou nazýváme veličinu, terá s určitými p-stmi nabývá reálných hodnot jednoznačně přiřazených výsledům příslušných náhodných pousů Náhodné veličiny obvyle dělíme na dva záladní
Náhodná veličina Náhodnou veličinou nazýváme veličinu, terá s určitými p-stmi nabývá reálných hodnot jednoznačně přiřazených výsledům příslušných náhodných pousů Náhodné veličiny obvyle dělíme na dva záladní
20 - Číslicové a diskrétní řízení
 20 - Číslicové a disrétní řízení Michael Šebe Automaticé řízení 2013 22-4-14 Analogové a číslicové řízení Proč číslicově? Snadno se přeprogramuje (srovnej s výměnou rezistorů/apacitorů v analogové řídicím
20 - Číslicové a disrétní řízení Michael Šebe Automaticé řízení 2013 22-4-14 Analogové a číslicové řízení Proč číslicově? Snadno se přeprogramuje (srovnej s výměnou rezistorů/apacitorů v analogové řídicím
KOMPLEXNÍ ČÍSLA INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ
 KOMPLEXNÍ ČÍSLA Gymnázium Jiřího Wolkera v Prostějově Výukové materiály z matematiky pro vyšší gymnázia Autoři projektu Student na prahu 21. století - využití ICT ve vyučování matematiky na gymnáziu INVESTICE
KOMPLEXNÍ ČÍSLA Gymnázium Jiřího Wolkera v Prostějově Výukové materiály z matematiky pro vyšší gymnázia Autoři projektu Student na prahu 21. století - využití ICT ve vyučování matematiky na gymnáziu INVESTICE
7.3.9 Směrnicový tvar rovnice přímky
 739 Směrnicový tvar rovnice přímy Předpolady: 7306 Pedagogicá poznáma: Stává se, že v hodině nestihneme poslední část s určováním vztahu mezi směrnicemi olmých příme Vrátíme se obecné rovnici přímy: Obecná
739 Směrnicový tvar rovnice přímy Předpolady: 7306 Pedagogicá poznáma: Stává se, že v hodině nestihneme poslední část s určováním vztahu mezi směrnicemi olmých příme Vrátíme se obecné rovnici přímy: Obecná
SPECIÁLNÍCH PRIMITIVNÍCH FUNKCÍ INTEGRACE RACIONÁLNÍCH FUNKCÍ
 VÝPOČET PEIÁLNÍH PRIMITIVNÍH FUNKÍ Obecně nelze zadat algoritmus, který by vždy vedl k výpočtu primitivní funkce. Nicméně eistují jisté třídy funkcí, pro které eistuje algoritmus, který vždy vede k výpočtu
VÝPOČET PEIÁLNÍH PRIMITIVNÍH FUNKÍ Obecně nelze zadat algoritmus, který by vždy vedl k výpočtu primitivní funkce. Nicméně eistují jisté třídy funkcí, pro které eistuje algoritmus, který vždy vede k výpočtu
Funkce komplexní proměnné a integrální transformace
 Funkce komplexní proměnné a integrální transformace Fourierovy řady I. Marek Lampart Text byl vytvořen v rámci realizace projektu Matematika pro inženýry 21. století (reg. č. CZ.1.07/2.2.00/07.0332), na
Funkce komplexní proměnné a integrální transformace Fourierovy řady I. Marek Lampart Text byl vytvořen v rámci realizace projektu Matematika pro inženýry 21. století (reg. č. CZ.1.07/2.2.00/07.0332), na
SPOTŘEBITELSKÝ ÚVĚR. Na začátku provedeme inicializaci proměnných jejich vynulováním příkazem "restart". To oceníme při opakovaném použití dokumentu.
 Úloha 1 - Koupě nového televizoru SPOTŘEBITELSKÝ ÚVĚR Chceme si oupit nový televizor v hodnotě 000,-Kč. Bana nám půjčí, přičemž její úroová sazba činí 11%. Předpoládejme, že si půjčujeme na jeden ro a
Úloha 1 - Koupě nového televizoru SPOTŘEBITELSKÝ ÚVĚR Chceme si oupit nový televizor v hodnotě 000,-Kč. Bana nám půjčí, přičemž její úroová sazba činí 11%. Předpoládejme, že si půjčujeme na jeden ro a
Nyní využijeme slovník Laplaceovy transformace pro derivaci a přímé hodnoty a dostaneme běžnou algebraickou rovnici. ! 2 "
 ŘEŠENÉ PŘÍKLADY Z MB ČÁST Příklad Nalezněte pomocí Laplaceovy transformace řešení dané Cauchyho úlohy lineární diferenciální rovnice prvního řádu s konstantními koeficienty v intervalu 0,, které vyhovuje
ŘEŠENÉ PŘÍKLADY Z MB ČÁST Příklad Nalezněte pomocí Laplaceovy transformace řešení dané Cauchyho úlohy lineární diferenciální rovnice prvního řádu s konstantními koeficienty v intervalu 0,, které vyhovuje
6 5 = 0, = 0, = 0, = 0, 0032
 III. Opaované pousy, Bernoulliho nerovnost. Házíme pětrát hrací ostou a sledujeme výsyt šesty. Spočtěte pravděpodobnosti možných výsledů a určete, terý má největší pravděpodobnost. Řešení: Jedná se o serii
III. Opaované pousy, Bernoulliho nerovnost. Házíme pětrát hrací ostou a sledujeme výsyt šesty. Spočtěte pravděpodobnosti možných výsledů a určete, terý má největší pravděpodobnost. Řešení: Jedná se o serii
LINEÁRNÍ ROVNICE S ABSOLUTNÍ HODNOTOU
 LINEÁRNÍ ROVNICE S ABSOLUTNÍ HODNOTOU LINEÁRNÍ ROVNICE S ABSOLUTNÍ HODNOTOU je lineární rovnice, ve které se vyskytuje jeden nebo více výrazů v absolutní hodnotě. ABSOLUTNÍ HODNOTA x reálného čísla x je
LINEÁRNÍ ROVNICE S ABSOLUTNÍ HODNOTOU LINEÁRNÍ ROVNICE S ABSOLUTNÍ HODNOTOU je lineární rovnice, ve které se vyskytuje jeden nebo více výrazů v absolutní hodnotě. ABSOLUTNÍ HODNOTA x reálného čísla x je
Limita a spojitost LDF MENDELU
 Limita a spojitost Základy vyšší matematiky LDF MENDELU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipĺıny společného základu
Limita a spojitost Základy vyšší matematiky LDF MENDELU Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipĺıny společného základu
KOMPLEXNÍ ČÍSLA INVESTICE DO ROZVOJE VZDĚLÁVÁNÍ. Tento projekt je spolufinancován Evropským sociálním fondem a státním rozpočtem České republiky
 KOMPLEXNÍ ČÍSLA Gymnázium Jiřího Wolkera v Prostějově Výukové materiály z matematiky pro vyšší gymnázia Autoři projektu Student na prahu 21. století - využití ICT ve vyučování matematiky na gymnáziu INVESTICE
KOMPLEXNÍ ČÍSLA Gymnázium Jiřího Wolkera v Prostějově Výukové materiály z matematiky pro vyšší gymnázia Autoři projektu Student na prahu 21. století - využití ICT ve vyučování matematiky na gymnáziu INVESTICE
Funkční měniče. A. Na předloženém aproximačním funkčním měniči s operačním zesilovačem realizujícím funkci danou tabulkou:
 Funční měniče. Zadání: A. Na předloženém aproximačním funčním měniči s operačním zesilovačem realizujícím funci danou tabulou: proveďte: U / V / V a) pomocí oscilosopu měnič nastavte b) změřte na něm jeho
Funční měniče. Zadání: A. Na předloženém aproximačním funčním měniči s operačním zesilovačem realizujícím funci danou tabulou: proveďte: U / V / V a) pomocí oscilosopu měnič nastavte b) změřte na něm jeho
Aplikovaná informatika. Podklady předmětu Aplikovaná informatika pro akademický rok 2013/2014 Radim Farana. Obsah. Detekce chyb
 Podlady předmětu pro aademicý ro /4 Radim Farana Obsa Detece cyb, Hamminoa dálenost Kontrolní a samooprané ódy Lineární ódy Hamminoy ódy Opaoací ódy Cylicé ódy Detece cyb Množinu šec slo rodělíme na sloa
Podlady předmětu pro aademicý ro /4 Radim Farana Obsa Detece cyb, Hamminoa dálenost Kontrolní a samooprané ódy Lineární ódy Hamminoy ódy Opaoací ódy Cylicé ódy Detece cyb Množinu šec slo rodělíme na sloa
Matematika IV 9. týden Vytvořující funkce
 Matematika IV 9. týden Vytvořující funkce Jan Slovák Masarykova univerzita Fakulta informatiky jaro 2015 Obsah přednášky 1 Vytvořující funkce a Fibonacciho čísla 2 Vytvořující funkce - připomenutí 3 Řešení
Matematika IV 9. týden Vytvořující funkce Jan Slovák Masarykova univerzita Fakulta informatiky jaro 2015 Obsah přednášky 1 Vytvořující funkce a Fibonacciho čísla 2 Vytvořující funkce - připomenutí 3 Řešení
Kirchhoffovy zákony. Kirchhoffovy zákony
 Kirchhoffovy zákony 1. Kirchhoffův zákon zákon o zachování elektrických nábojů uzel, větev obvodu... Algebraický součet všech proudů v uzlu se rovná nule Kirchhoffovy zákony 2. Kirchhoffův zákon zákon
Kirchhoffovy zákony 1. Kirchhoffův zákon zákon o zachování elektrických nábojů uzel, větev obvodu... Algebraický součet všech proudů v uzlu se rovná nule Kirchhoffovy zákony 2. Kirchhoffův zákon zákon
I. Určete(a nakreslete) definiční obor a vrstevnice funkcí 1. f(x, y)=x+ y 2. f(x, y)= y 3. f(x, y)=x 2 + y 2 4. f(x, y)=x 2 y 2
 definiční obor a vrstevnice funkcí 1. f(x, y)=x+ y 2. f(x, y)= y 3. f(x, y)=x 2 + y 2 4. f(x, y)=x 2 y 2") I. Určete(a nareslete) definiční obor a vrstevnice funcí. f( )=+. f( )=. f( )= +. f( )= 5. f( )=. f( )= 7. f( )= + 8. f( )= ( + )( ) 9. f( )= ( + ) 0. f( )= sin( + ). f( )=sgn(sin sin). f( )= + Rozhodněte
I. Určete(a nareslete) definiční obor a vrstevnice funcí. f( )=+. f( )=. f( )= +. f( )= 5. f( )=. f( )= 7. f( )= + 8. f( )= ( + )( ) 9. f( )= ( + ) 0. f( )= sin( + ). f( )=sgn(sin sin). f( )= + Rozhodněte
M - Příprava na 1. čtvrtletku - třída 3ODK
 M - Příprava na 1. čtvrtletku - třída ODK Souhrnný studijní materiál k přípravě na čtvrtletní písemnou práci. Obsahuje učivo října až prosince 007. VARIACE 1 Tento dokument byl kompletně vytvořen, sestaven
M - Příprava na 1. čtvrtletku - třída ODK Souhrnný studijní materiál k přípravě na čtvrtletní písemnou práci. Obsahuje učivo října až prosince 007. VARIACE 1 Tento dokument byl kompletně vytvořen, sestaven
Mocnost bodu ke kružnici
 3..0 ocnost bodu e ružnici Předpolady: 309 Př. : Je dána ružnice a bod, ležící vně ružnice. Veď bodem dvě různé sečny ružnice p a p. Průsečíy sečny p,. Průsečíy sečny p,. Změř potřebné vzdálenosti a spočti
3..0 ocnost bodu e ružnici Předpolady: 309 Př. : Je dána ružnice a bod, ležící vně ružnice. Veď bodem dvě různé sečny ružnice p a p. Průsečíy sečny p,. Průsečíy sečny p,. Změř potřebné vzdálenosti a spočti
MECHANICKÉ KMITÁNÍ NETLUMENÉ
 MECHANICKÉ KMITÁNÍ NETLUMENÉ Kitání je PERIODICKÝ pohyb hotného bodu (tělesa). Pohybuje se z jedné rajní polohy KP do druhé rajní polohy KP a zpět. Jaýoliv itající objet se nazývá OSCILÁTOR. A je aplituda
MECHANICKÉ KMITÁNÍ NETLUMENÉ Kitání je PERIODICKÝ pohyb hotného bodu (tělesa). Pohybuje se z jedné rajní polohy KP do druhé rajní polohy KP a zpět. Jaýoliv itající objet se nazývá OSCILÁTOR. A je aplituda
Mocnost bodu ke kružnici
 3.. ocnost bodu e ružnici Předpolady: 03009 Př. : Je dána ružnice a bod, ležící vně ružnice. Veď bodem dvě různé sečny ružnice p a p. Průsečíy sečny p s ružnicí označ A, B. Průsečíy sečny p s ružnicí označ
3.. ocnost bodu e ružnici Předpolady: 03009 Př. : Je dána ružnice a bod, ležící vně ružnice. Veď bodem dvě různé sečny ružnice p a p. Průsečíy sečny p s ružnicí označ A, B. Průsečíy sečny p s ružnicí označ
PŘÍKLAD VÝPOČTU RÁMU PODLE ČSN EN
 PŘÍKLAD VÝPOČTU RÁU PODLE ČS E 99-- Jaub Dolejš*), Zdeně Sool**).Zadání avrhněte sloup plnostěnného dvouloubového rámu, jehož roměr jsou patrné obráu. Horní pásnice příčle je po celé délce ajištěna proti
PŘÍKLAD VÝPOČTU RÁU PODLE ČS E 99-- Jaub Dolejš*), Zdeně Sool**).Zadání avrhněte sloup plnostěnného dvouloubového rámu, jehož roměr jsou patrné obráu. Horní pásnice příčle je po celé délce ajištěna proti
7. ZÁKLADNÍ TYPY DYNAMICKÝCH SYSTÉMŮ
 7. ZÁKADNÍ TYPY DYNAMICKÝCH SYSTÉMŮ 7.. SPOJITÉ SYSTÉMY Téměř všechny fyzálně realzovatelné spojté lneární systémy (romě systémů s dopravním zpožděním lze vytvořt z prvů tří typů: proporconálních členů
7. ZÁKADNÍ TYPY DYNAMICKÝCH SYSTÉMŮ 7.. SPOJITÉ SYSTÉMY Téměř všechny fyzálně realzovatelné spojté lneární systémy (romě systémů s dopravním zpožděním lze vytvořt z prvů tří typů: proporconálních členů
základní vlastnosti, používané struktury návrhové prostředky MATLAB problém kvantování koeficientů
 A0M38SPP - Signálové procesory v praxi - přednáška 4 2 Číslicové filtry typu FIR a IIR definice operace filtrace základní rozdělení FIR, IIR základní vlastnosti, používané struktury filtrů návrhové prostředky
A0M38SPP - Signálové procesory v praxi - přednáška 4 2 Číslicové filtry typu FIR a IIR definice operace filtrace základní rozdělení FIR, IIR základní vlastnosti, používané struktury filtrů návrhové prostředky
3.3.4 Thaletova věta. Předpoklady:
 3.3.4 Thaletova věta Předpolady: 030303 Př. : Narýsuj ružnici ( ;5cm) a její průměr. Na ružnici narýsuj libovolný bod různý od bodů, (bod zvol jina než soused v lavici). Narýsuj trojúhelní. Má nějaou speciální
3.3.4 Thaletova věta Předpolady: 030303 Př. : Narýsuj ružnici ( ;5cm) a její průměr. Na ružnici narýsuj libovolný bod různý od bodů, (bod zvol jina než soused v lavici). Narýsuj trojúhelní. Má nějaou speciální
Otázky k ústní zkoušce, přehled témat A. Číselné řady
 Otázky k ústní zkoušce, přehled témat 2003-2004 A Číselné řady Vysvětlete pojmy částečný součet řady, součet řady, řadonverguje, řada je konvergentní Formulujte nutnou podmínku konvergence řady a odvoďte
Otázky k ústní zkoušce, přehled témat 2003-2004 A Číselné řady Vysvětlete pojmy částečný součet řady, součet řady, řadonverguje, řada je konvergentní Formulujte nutnou podmínku konvergence řady a odvoďte
KMA/P506 Pravděpodobnost a statistika KMA/P507 Statistika na PC
 Přednáša 02 Přírodovědecá faulta Katedra matematiy KMA/P506 Pravděpodobnost a statistia KMA/P507 Statistia na PC jiri.cihlar@ujep.cz Náhodné veličiny Záladní definice Nechť je dán pravděpodobnostní prostor
Přednáša 02 Přírodovědecá faulta Katedra matematiy KMA/P506 Pravděpodobnost a statistia KMA/P507 Statistia na PC jiri.cihlar@ujep.cz Náhodné veličiny Záladní definice Nechť je dán pravděpodobnostní prostor
Funkce jedn e re aln e promˇ enn e Derivace Pˇredn aˇska ˇr ıjna 2015
 Funkce jedné reálné proměnné Derivace Přednáška 2 15. října 2015 Obsah 1 Funkce 2 Limita a spojitost funkce 3 Derivace 4 Průběh funkce Informace Literatura v elektronické verzi (odkazy ze STAGu): 1 Lineární
Funkce jedné reálné proměnné Derivace Přednáška 2 15. října 2015 Obsah 1 Funkce 2 Limita a spojitost funkce 3 Derivace 4 Průběh funkce Informace Literatura v elektronické verzi (odkazy ze STAGu): 1 Lineární
O řešení diferenční rovnice y(n+2) 1, 25y(n+1)+0, 78125y(n) = x(n + 2) x(n)
 1, 25y(n+1)+0, 78125y(n) = x(n + 2) x(n)") O řešení diferenční rovnice yn+), 5yn+)+0, 785yn) xn + ) xn) Prof. RNDr. Josef Diblík, DrSc. a Prof. Ing. Zdeněk Smékal, CSc. V příspěvku je řešena rovnice Abstrakt yn + ), 5yn + ) + 0, 785yn) xn + ) xn)
O řešení diferenční rovnice yn+), 5yn+)+0, 785yn) xn + ) xn) Prof. RNDr. Josef Diblík, DrSc. a Prof. Ing. Zdeněk Smékal, CSc. V příspěvku je řešena rovnice Abstrakt yn + ), 5yn + ) + 0, 785yn) xn + ) xn)
Návrh vysokofrekvenčních linkových transformátorů
 inové transformátory inové transformátory Při požadavu na transformaci impedancí v široém frevenčním pásmu, dy nelze obsáhnout požadovanou oblast mitočtů ani široopásmovými obvody, je třeba použít široopásmových
inové transformátory inové transformátory Při požadavu na transformaci impedancí v široém frevenčním pásmu, dy nelze obsáhnout požadovanou oblast mitočtů ani široopásmovými obvody, je třeba použít široopásmových
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
1 Tyto materiály byly vytvořeny za pomoci grantu FRVŠ číslo 1145/2004.
 Prostá regresní a korelační analýza 1 1 Tyto materiály byly vytvořeny za pomoci grantu FRVŠ číslo 1145/2004. Problematika závislosti V podstatě lze rozlišovat mezi závislostí nepodstatnou, čili náhodnou
Prostá regresní a korelační analýza 1 1 Tyto materiály byly vytvořeny za pomoci grantu FRVŠ číslo 1145/2004. Problematika závislosti V podstatě lze rozlišovat mezi závislostí nepodstatnou, čili náhodnou
f k nazýváme funkční řadou v M.
 6. Funční řdy posloupnosti. Bodová stejnoměrná onvergence. Nechť pro N jsou f omplení či reálné funce omplení či reálné proměnné, teré mjí společný definiční obor M. Posloupnost {f ; N} nzýváme funční
6. Funční řdy posloupnosti. Bodová stejnoměrná onvergence. Nechť pro N jsou f omplení či reálné funce omplení či reálné proměnné, teré mjí společný definiční obor M. Posloupnost {f ; N} nzýváme funční
Číslicová filtrace. FIR filtry IIR filtry. ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta elektrotechnická
 ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta elektrotechnická Ing. Radek Sedláček, Ph.D., katedra měření K13138 Číslicová filtrace FIR filtry IIR filtry Tyto materiály vznikly za podpory Fondu rozvoje
ČESKÉ VYSOKÉ UČENÍ TECHNICKÉ V PRAZE Fakulta elektrotechnická Ing. Radek Sedláček, Ph.D., katedra měření K13138 Číslicová filtrace FIR filtry IIR filtry Tyto materiály vznikly za podpory Fondu rozvoje
Metoda konjugovaných gradientů
 0 Metoda onjugovaných gradientů Ludě Kučera MFF UK 11. ledna 2017 V tomto textu je popsáno, ja metodou onjugovaných gradientů řešit soustavu lineárních rovnic Ax = b, de b je daný vetor a A je symetricá
0 Metoda onjugovaných gradientů Ludě Kučera MFF UK 11. ledna 2017 V tomto textu je popsáno, ja metodou onjugovaných gradientů řešit soustavu lineárních rovnic Ax = b, de b je daný vetor a A je symetricá
Lineární rovnice pro učební obory
 Variace 1 Lineární rovnice pro učební obory Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Rovnice Co je rovnice
Variace 1 Lineární rovnice pro učební obory Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Rovnice Co je rovnice
Variace. Lineární rovnice
 Variace 1 Lineární rovnice Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Rovnice Co je rovnice Rovnice je
Variace 1 Lineární rovnice Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Rovnice Co je rovnice Rovnice je
3.2.9 Věta o středovém a obvodovém úhlu
 3..9 ěta o středovém a obvodovém úhlu Předpolady: ody, rozdělují ružnici na dva oblouy. Polopřímy a pa rozdělují rovinu na dva úhly. rcholy obou úhlů leží ve středu ružnice říáme, že jde o středové úhly
3..9 ěta o středovém a obvodovém úhlu Předpolady: ody, rozdělují ružnici na dva oblouy. Polopřímy a pa rozdělují rovinu na dva úhly. rcholy obou úhlů leží ve středu ružnice říáme, že jde o středové úhly
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY
 SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
CVIČNÝ TEST 5. OBSAH I. Cvičný test 2. Mgr. Václav Zemek. II. Autorské řešení 6 III. Klíč 17 IV. Záznamový list 19
 CVIČNÝ TEST 5 Mgr. Václav Zemek OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 17 IV. Záznamový list 19 I. CVIČNÝ TEST 1 Zjednodušte výraz (2x 5) 2 (2x 5) (2x + 5) + 20x. 2 Určete nejmenší trojciferné
CVIČNÝ TEST 5 Mgr. Václav Zemek OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 17 IV. Záznamový list 19 I. CVIČNÝ TEST 1 Zjednodušte výraz (2x 5) 2 (2x 5) (2x + 5) + 20x. 2 Určete nejmenší trojciferné
ÚPGM FIT VUT Brno,
 Systémy s diskrétním časem Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1 LTI systémy v tomto kursu budeme pracovat pouze se systémy lineárními a časově invariantními. Úvod k nim jsme viděli již
Systémy s diskrétním časem Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1 LTI systémy v tomto kursu budeme pracovat pouze se systémy lineárními a časově invariantními. Úvod k nim jsme viděli již
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály Systémy: definice, několik příkladů Vlastnosti systémů
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály Systémy: definice, několik příkladů Vlastnosti systémů
Flexibilita jednoduché naprogramování a přeprogramování řídícího systému
 Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
7.3.9 Směrnicový tvar rovnice přímky
 7.3.9 Směrnicový tvar rovnice přímy Předpolady: 7306 Pedagogicá poznáma: Stává se, že v hodině nestihneme poslední část s určováním vztahu mezi směrnicemi olmých příme. Vrátíme se obecné rovnici přímy:
7.3.9 Směrnicový tvar rovnice přímy Předpolady: 7306 Pedagogicá poznáma: Stává se, že v hodině nestihneme poslední část s určováním vztahu mezi směrnicemi olmých příme. Vrátíme se obecné rovnici přímy:
1 Extrémy funkcí - slovní úlohy
 1 Extrémy funkcí - slovní úlohy Příklad 1.1. Součet dvou kladných reálných čísel je a. Určete 1. Minimální hodnotu součtu jejich n-tých mocnin.. Maximální hodnotu součinu jejich n-tých mocnin. Řešení.
1 Extrémy funkcí - slovní úlohy Příklad 1.1. Součet dvou kladných reálných čísel je a. Určete 1. Minimální hodnotu součtu jejich n-tých mocnin.. Maximální hodnotu součinu jejich n-tých mocnin. Řešení.
Úvodní informace. 17. února 2018
 Úvodní informace Funkce více proměnných Přednáška první 17. února 2018 Obsah 1 Úvodní informace. 2 Funkce více proměnných Definiční obor Limita a spojitost Derivace, diferencovatelnost, diferenciál Úvodní
Úvodní informace Funkce více proměnných Přednáška první 17. února 2018 Obsah 1 Úvodní informace. 2 Funkce více proměnných Definiční obor Limita a spojitost Derivace, diferencovatelnost, diferenciál Úvodní
Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček. 8. přednáška 11MSP pondělí 20. dubna 2015
 Bohumil Kovář, Jan Přikryl, Miroslav Vlček. 8. přednáška 11MSP pondělí 20. dubna 2015") Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 8. přednáška 11MSP pondělí 20. dubna 2015 verze: 2015-04-14 12:31
Modelování systémů a procesů (11MSP) Bohumil Kovář, Jan Přikryl, Miroslav Vlček Ústav aplikované matematiky ČVUT v Praze, Fakulta dopravní 8. přednáška 11MSP pondělí 20. dubna 2015 verze: 2015-04-14 12:31
23 - Diskrétní systémy
 23 - Disrétní systémy Michael Šebe Automaticé řízení 218 29-4-18 Disrétní čas: z podstaty, z měření či z pohonu Otáčející se radar - měření polohy cíle jednou za otáču radaru motivace v počátcích historie
23 - Disrétní systémy Michael Šebe Automaticé řízení 218 29-4-18 Disrétní čas: z podstaty, z měření či z pohonu Otáčející se radar - měření polohy cíle jednou za otáču radaru motivace v počátcích historie
MULTIKRITERIÁLNÍ ROZHODOVÁNÍ VEKTOROVÁ OPTIMALIZACE
 OPTIMALIZACE A ROZHODOVÁNÍ V DOPRAVĚ část druhá Přednáša 5 PŘEDNÁŠKA 5 MULTIKRITERIÁLNÍ ROZHODOVÁNÍ VEKTOROVÁ OPTIMALIZACE OPTIMALIZACE A ROZHODOVÁNÍ V DOPRAVĚ část druhá Přednáša 5 Multiriteriální rozhodování
OPTIMALIZACE A ROZHODOVÁNÍ V DOPRAVĚ část druhá Přednáša 5 PŘEDNÁŠKA 5 MULTIKRITERIÁLNÍ ROZHODOVÁNÍ VEKTOROVÁ OPTIMALIZACE OPTIMALIZACE A ROZHODOVÁNÍ V DOPRAVĚ část druhá Přednáša 5 Multiriteriální rozhodování
FUNKCE, ZÁKLADNÍ POJMY - CVIČENÍ
 MENDELOVA UNIVERZITA V BRNĚ LDF MT MATEMATIKA FUNKCE, ZÁKLADNÍ POJMY - CVIČENÍ Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipliny
MENDELOVA UNIVERZITA V BRNĚ LDF MT MATEMATIKA FUNKCE, ZÁKLADNÍ POJMY - CVIČENÍ Podpořeno projektem Průřezová inovace studijních programů Lesnické a dřevařské fakulty MENDELU v Brně (LDF) s ohledem na discipliny
Číslicové filtry. Honza Černocký, ÚPGM
 Číslicové filtry Honza Černocký, ÚPGM Aliasy Digitální filtry Diskrétní systémy Systémy s diskrétním časem atd. 2 Na co? Úprava signálů Zdůraznění Potlačení Detekce 3 Zdůraznění basy 4 Zdůraznění výšky
Číslicové filtry Honza Černocký, ÚPGM Aliasy Digitální filtry Diskrétní systémy Systémy s diskrétním časem atd. 2 Na co? Úprava signálů Zdůraznění Potlačení Detekce 3 Zdůraznění basy 4 Zdůraznění výšky
Analýza lineárních regulačních systémů v časové doméně. V Modelice (ale i v Simulinku) máme blok TransfeFunction
 máme blok TransfeFunction") Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
1 Mnohočleny a algebraické rovnice
 1 Mnohočleny a algebraické rovnice 1.1 Pojem mnohočlenu (polynomu) Připomeňme, že výrazům typu a 2 x 2 + a 1 x + a 0 říkáme kvadratický trojčlen, když a 2 0. Číslům a 0, a 1, a 2 říkáme koeficienty a písmenem
1 Mnohočleny a algebraické rovnice 1.1 Pojem mnohočlenu (polynomu) Připomeňme, že výrazům typu a 2 x 2 + a 1 x + a 0 říkáme kvadratický trojčlen, když a 2 0. Číslům a 0, a 1, a 2 říkáme koeficienty a písmenem
III. Diferenciál funkce a tečná rovina 8. Diferenciál funkce. Přírůstek funkce. a = (x 0, y 0 ), h = (h 1, h 2 ).
, h = (h 1, h 2 ).") III. Diferenciál funkce a tečná rovina 8. Diferenciál funkce. Přírůstek funkce = f(x 0 + h 1, y 0 + h 2 ) f(x 0, y 0 ) f u (x 0, y 0 ), kde u = (h 1, h 2 ). ( ) = f(x 0 + h 1, y 0 ) f(x 0, y 0 ) x (x 0,
III. Diferenciál funkce a tečná rovina 8. Diferenciál funkce. Přírůstek funkce = f(x 0 + h 1, y 0 + h 2 ) f(x 0, y 0 ) f u (x 0, y 0 ), kde u = (h 1, h 2 ). ( ) = f(x 0 + h 1, y 0 ) f(x 0, y 0 ) x (x 0,
Lineární a adpativní zpracování dat. 3. Lineární filtrace I: Z-transformace, stabilita
 Lineární a adpativní zpracování dat 3. Lineární filtrace I: Z-transformace, stabilita Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály, systémy, jejich vlastnosti a popis v časové
Lineární a adpativní zpracování dat 3. Lineární filtrace I: Z-transformace, stabilita Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály, systémy, jejich vlastnosti a popis v časové
( ) Příklady na otočení. Předpoklady: Př. 1: Je dána kružnice k ( S ;5cm)
 Příklady na otočení. Předpoklady: Př. 1: Je dána kružnice k ( S ;5cm)") 3.5.9 Přílady na otočení Předpolady: 3508 Př. 1: Je dána ružnice ( ;5cm), na teré leží body, '. Vně ružnice leží bod L, uvnitř ružnice bod M. Naresli obrazy bodů L, M v zobrazení řeš bez úhloměru. R (
3.5.9 Přílady na otočení Předpolady: 3508 Př. 1: Je dána ružnice ( ;5cm), na teré leží body, '. Vně ružnice leží bod L, uvnitř ružnice bod M. Naresli obrazy bodů L, M v zobrazení řeš bez úhloměru. R (
a jeho hodnotu pro x = 2 a jeho hodnotu pro x = 2 3 x. a jeho hodnotu pro x = 2 a jeho hodnotu pro x = 6; x = 13 28 = 1 7 a jeho hodnotu pro x = 2
 Obsah Definiční obory výrazů s proměnnou... Zápisy výrazů...3 Sčítání a odčítání mnohočlenů...4 Násobení mnohočlenů...5 Dělení mnohočlenů...7 Rozklad mnohočlenů na součin vytýkání...9 Rozklad mnohočlenů
Obsah Definiční obory výrazů s proměnnou... Zápisy výrazů...3 Sčítání a odčítání mnohočlenů...4 Násobení mnohočlenů...5 Dělení mnohočlenů...7 Rozklad mnohočlenů na součin vytýkání...9 Rozklad mnohočlenů
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY
 VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
VYBRANÉ PARTIE Z NUMERICKÉ MATEMATIKY Jan Krejčí 31. srpna 2006 jkrejci@physics.ujep.cz http://physics.ujep.cz/~jkrejci Obsah 1 Přímé metody řešení soustav lineárních rovnic 3 1.1 Gaussova eliminace...............................
Funkce a lineární funkce pro studijní obory
 Variace 1 Funkce a lineární funkce pro studijní obory Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Funkce
Variace 1 Funkce a lineární funkce pro studijní obory Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu na www.jarjurek.cz. 1. Funkce
Úlohy k přednášce NMAG 101 a 120: Lineární algebra a geometrie 1 a 2,
 Úlohy k přednášce NMAG a : Lineární algebra a geometrie a Verze ze dne. května Toto je seznam přímočarých příkladů k přednášce. Úlohy z tohoto seznamu je nezbytně nutné umět řešit. Podobné typy úloh se
Úlohy k přednášce NMAG a : Lineární algebra a geometrie a Verze ze dne. května Toto je seznam přímočarých příkladů k přednášce. Úlohy z tohoto seznamu je nezbytně nutné umět řešit. Podobné typy úloh se
Identifikace systémů
 Identifikace systémů Přednáška 2 Osvald Modrlák, Lukáš Hubka TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Identifikace systémů Přednáška 2 Osvald Modrlák, Lukáš Hubka TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
kuncova/, 2x + 3 (x 2)(x + 5) = A x 2 + B Přenásobením této rovnice (x 2)(x + 5) dostaneme rovnost
(x + 5) = A x 2 + B Přenásobením této rovnice (x 2)(x + 5) dostaneme rovnost") . cvičení http://www.karlin.mff.cuni.cz/ kuncova/, kytaristka@gmail.com Příklady Najděte primitivní funkce k následujícím funkcím na maimální možné podmnožině reálných čísel a tuto množinu určete.. f()
. cvičení http://www.karlin.mff.cuni.cz/ kuncova/, kytaristka@gmail.com Příklady Najděte primitivní funkce k následujícím funkcím na maimální možné podmnožině reálných čísel a tuto množinu určete.. f()
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
LEKCE10-RAD Otázky
 Řady -ekv ne ŘADY ČÍSEL 1. limita posloupnosti (operace založená na vzdálenosti bodů) 2. supremum nebo infimum posloupnosti (operace založená na uspořádání bodů). Z hlavních struktur reálných čísel zbývá
Řady -ekv ne ŘADY ČÍSEL 1. limita posloupnosti (operace založená na vzdálenosti bodů) 2. supremum nebo infimum posloupnosti (operace založená na uspořádání bodů). Z hlavních struktur reálných čísel zbývá
SIGNÁLY A LINEÁRNÍ SYSTÉMY
 SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz @iba.muni.cz,, Kamenice 3, 4. patro, dv.č.44.44 INVESTICE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz XI. STABILITA
SIGNÁLY A LINEÁRNÍ SYSTÉMY prof. Ing. Jiří Holčík, CSc. holcik@iba.muni.cz @iba.muni.cz,, Kamenice 3, 4. patro, dv.č.44.44 INVESTICE Institut DO biostatistiky ROZVOJE VZDĚLÁVÁNÍ a analýz XI. STABILITA
Diferenciální počet funkcí více reálných proměnných PŘÍKLAD 1. Nalezněte funkční předpis kvadratické formy F( z1, z2, z = A.
 Diferenciální počet funkcí více reálných proměnných -6- KVADRATICKÉ FORMY PŘÍKLAD Naleněte funkční předpis kvadratické formy F(, ) adané maticí A 4 Pro obecnou kvadratickou formu dvou proměnných platí
Diferenciální počet funkcí více reálných proměnných -6- KVADRATICKÉ FORMY PŘÍKLAD Naleněte funkční předpis kvadratické formy F(, ) adané maticí A 4 Pro obecnou kvadratickou formu dvou proměnných platí
PRAVDĚPODOBNOST A STATISTIKA
 PRAVDĚPODOBNOST A STATISTIKA Číselné charateristiy náhodných proměnných Charateristiy náhodných proměnných dělíme nejčastěji na charateristiy polohy a variability. Mezi charateristiy polohy se nejčastěji
PRAVDĚPODOBNOST A STATISTIKA Číselné charateristiy náhodných proměnných Charateristiy náhodných proměnných dělíme nejčastěji na charateristiy polohy a variability. Mezi charateristiy polohy se nejčastěji
Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice
 Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice Vektorové podprostory K množina reálných nebo komplexních čísel, U vektorový prostor nad K. Lineární kombinace vektorů u 1, u 2,...,u
Vektorové podprostory, lineární nezávislost, báze, dimenze a souřadnice Vektorové podprostory K množina reálných nebo komplexních čísel, U vektorový prostor nad K. Lineární kombinace vektorů u 1, u 2,...,u
Obsah. Aplikovaná matematika I. Gottfried Wilhelm Leibniz. Základní vlastnosti a vzorce
 Neurčitý integrál Aplikovaná matematika I Dana Říhová Mendelu Brno Obsah Primitivní funkce, neurčitý integrál Základní vlastnosti a vzorce Základní integrační metody Úpravy integrandu Integrace racionálních
Neurčitý integrál Aplikovaná matematika I Dana Říhová Mendelu Brno Obsah Primitivní funkce, neurčitý integrál Základní vlastnosti a vzorce Základní integrační metody Úpravy integrandu Integrace racionálních