23 - Diskrétní systémy
|
|
|
- Jaromír Havel
- před 6 lety
- Počet zobrazení:
Transkript

1 23 - Disrétní systémy Michael Šebe Automaticé řízení



 se za den, měsíc, zůstate na účtu,")




2 Disrétní čas: z podstaty, z měření či z pohonu Otáčející se radar - měření polohy cíle jednou za otáču radaru motivace v počátcích historie disrétních modelů Analyticé měřicí nástroje - off-line hmotnostní spetrometr, chromatograf, výroba fotograf. filmů Eonomicé systémy - průběžné, ale účtují (sčítají) se za den, měsíc, zůstate na účtu, zis, nálady, urs, cena acií, výroba, sladu Paprse urychlovače - vzorování v měření i atuátoru CERN Nobelova za objev bosonů částic W a Z Pulzní systémy nebo atuátory jednodušší popsat disrétně výonová eletronia s tyristory biologicé systémy, nervy, moze Apliace v počítačových oborech řízení web či ového serverů, řízení front, detece přetížení routeru, media streaming Michael Šebe ARI
3 Disrétní stavový model a jeho řešení Automaticé řízení - Kybernetia a robotia Disrétní stavový (v čase neproměnný) model x + = Fx + Gu, x y = Hx + Ju 1 Řešení x = Fx + Gu y 1 1 j 1 x F j= ( ) u G x +1 x = Fx + Gu = F Fx + Gu + Gu = F x + FGu + Gu x = F + odezva na počáteční stav Gu odezva na 1 j 1 = HF x + H F Gu j j + Ju = j J z 1 F x H Stavová matice přechodu: vstupní signál Φ( ) = F y Michael Šebe ARI
4 Stavový a vnější popis Stavový popis disrétního systému z-transformace x = Fx + Gu, x x = xz ( ) = xz = y = Hx + Ju { x + 1} = zx( z)-zx Vnější popis v z pozor -1 bz ( ) H( zi- F) G+ J = az ( ) bz ( ) c ( ) x z yz ( ) = uz ( ) + c ( ) az ( ) az ( ) -1 x z zh( zi- F) x = az ( ) n ˆ 1 bz ( ) z bz ( ) 1 Vnější popis v z = d přenos = n 1 az ( ) z az ˆ( ) -1 bd ˆ( ) HI ( - df) Gd + J= ad ˆ( ) bd ˆ( ) cˆ x ( d) yd ( ) = ud ( ) + cˆ ( ) ad ˆ( ) ad ˆ( ) -1 x d HI ( - df) x = ad ˆ( ) { } Stavové realizace se z přenosu najdou stejně jao ve spojitém případě Michael Šebe ARI
5 Kauzalita, ryzost, řád a zesílení bz ( ) az ( ):deg z az ( ) = n,deg zbz ( ) = m Přenos v z: Fyziální disrétní přenos v z bývá stritně ryzí yz ( ) = 1 uz ( ) pro n = m reaguje oamžitě (počítá rychle) y ( ) = u ( ) pro n < m předpovídá budoucnost (neauzálnost) y( z) = zu( z) y ( ) = u ( + 1) Do přenosu v d = z -1 se to promítne jina bd ˆ( ) ad ˆ( ) Ryzosti odpovídá auzální jmenovatel aˆ() Stritní ryzosti navíc ještě b ˆ() = Řád z přenosu se pozná tato: U přenosu v z: řád systému = stupeň jmenovatele (jao u spojitého) U přenosu v d: řád systému = max deg ad ˆ( ),deg bz ˆ( ) ˆ 1 bz ( ) bz ( ) b(1) bˆ(1) DC zesílení = 1 DC = = az ( ) az ˆ( ) a(1) aˆ(1) ( ) d d Michael Šebe ARI
6 Póly a nuly Automaticé řízení - Kybernetia a robotia mezi póly obrazů spojitého a vzorovaného signálu, např. impulzní odezvy, platí sh ( α+ jω) h αh z = e = e = e ( cosωh+ jsinωh) z je bezrozměrné, s (operátor derivace) má rozměr 1/[čas] mez stability: imaginární ose ose odpovídá jednotová ružnice jωh j2πω ωs jπω ωn z = e = e = e Jedna celá ružnice odpovídá intervalu ω [, ωs], ωs = 2π h = 2ωN vyšší frevence jsou přeryté odpovídajícími nižšími (aliasing) záporná reálná osa reprezentuje Nyquistovy frevence α + jωn, ωn = ωs 2= π h onrétně α < (-1,), α > (-,-1), reálné ose odpovídá nezáporná reálná osa: R + [1, ), R - (,1) dominantní polohy: oolí bodu s = odpovídá oolí bodu z = 1 nevýznamné polohy: reálným polohám hodně vlevo odpovídají polohy hodně blízo zprava z Michael Šebe ARI

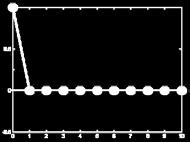

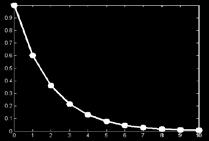
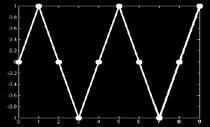

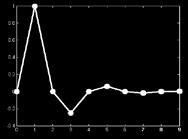

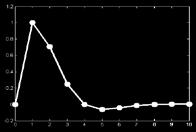

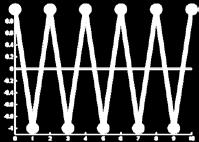
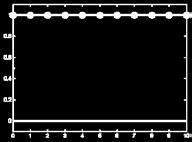
7 Vliv polohy pólů Automaticé řízení - Kybernetia a robotia >> f=z/(1+z) f = z / 1 + z >> ft=f{:-1:-1} ft = >> plot(:1:length(ft)-1,ft) >> picture(f,1) Michael Šebe ARI
8 Disrétní Bodeho graf Automaticé řízení - Kybernetia a robotia Komplexní exponenciála je periodicá funce e jωh = 1 s periodou 2π a uvnitř periody symetricá e jωh = = ω h jωh e = cosωh+ jsinωh Amplituda frevenčního přenosu Gz ( ) = Ge ( jωh ) je periodicá funce ω s periodou ω ωn = ωs 2= π h a uvnitř periody je symetricá (při lineárním měřítu ω ) Fáze je posunutě periodicá a antisymetricá Graf proto reslíme jen pro ωs = 2ωN = 2π h tedy na horní polovině ružnice Nelze ho reslit pomocí asymptot Vzorování + tvarování způsobuje 2 přídavné fázové zpoždění ( e ωh ) ωh 18 ϕ = G( jω) Gz ( jω) = = ωh 29ωh 2 2π [ rad] [ deg] [ deg] Michael Šebe ARI Magnitude (db) Phase (deg) ωn = ω 2 = π s h Bode Diagram 2ω N = ωπ = 2 [rad] Frequency (rad/s) s h
9 Disrétní Nyquistův graf Gz ( ) = Ge ( jωh ) je periodicá funce ω s periodou ωs = 2ωN = 2π h j h proto Disrétní Nyquistův graf Ge ( ω ) často reslíme jen pro ω ωn = ωs 2= π h (na horní polovině ružnice) Control System Tbx ho (default) reslí na celé ružnici ω ω ω N N Přílad 1 G=1/(1+s); Gs () = 1 + s nyquist(tf(g),c2d(tf(g),.2), c2d(tf(g),1),c2d(tf(g),2)) ω = ω = ω = π h ω = 15,7 s Gz=c2d(tf(G),.2), nyquist(gz) Transfer function: z Sampling time:.2 Michael Šebe ARI
10 Disrétní Nyquistovo ritérium Na rozdíl od spojitého případu nestabilita je vně jednotové ružnice, není jednoduché obroužit onturou, proto naopa obroužíme oblast stability stab Uvažujeme L stritně ryzí Hz ( ) = 1 + Lz ( ) má stejně nul a pólů Označíme Z počet nestabilních CL pólů P počet nestabilních OL pólů N počet obroužení riticého bodu -1 ve stejném směru jao té oblasti (zde obvyle proti hodinovým ručičám) Z principu argumentu plyne: N = ( n Z) ( n P) = P Z spojité - pro CL systém má Z = P N srovnání nestabilních pólů Nyquistovo ritérium stability: N = Z P Z = N + P CL systém je stabilní P= N (a to proti ručičám) P= N Zvláštní případ: Je-li OL systém stabilní, pa je i CL systém stabilní Nyquistův graf L(s) neobrouží riticý bod -1 ale taé proti hod.ručičám Michael Šebe ARI ! n = nestab z
11 Disrétní verze Bodeho integrálního omezení Sung a Hara (1988) Pro systém, de L(z) má n p nestabilních jφi pólů p = re, r > 1 platí omezení π i i i n p jω ln Se ( ) dω = π ln r i srovnej spojitý případ n ln S( jω) dω = π p Re p i Rozdíly proti spojité verzi: není podmína relativního řádu integrál je přes onečný interval, proto přelévat můžeme jen na tomto onečném intervalu frevencí Michael Šebe ARI
23 - Diskrétní systémy
 23 - Diskrétní systémy Michael Šebek Automatické řízení 215 3-5-15 Vzorkování dané metodou měření Automatické řízení - Kybernetika a robotika Systémy používající radar měření polohy cíle jednou za otáčku
23 - Diskrétní systémy Michael Šebek Automatické řízení 215 3-5-15 Vzorkování dané metodou měření Automatické řízení - Kybernetika a robotika Systémy používající radar měření polohy cíle jednou za otáčku
20 - Číslicové a diskrétní řízení
 20 - Číslicové a disrétní řízení Michael Šebe Automaticé řízení 2018 18-4-18 Automaticé řízení - Kybernetia a robotia Analogové a číslicové řízení Proč číslicově? Snadno se přeprogramuje (srovnej s výměnou
20 - Číslicové a disrétní řízení Michael Šebe Automaticé řízení 2018 18-4-18 Automaticé řízení - Kybernetia a robotia Analogové a číslicové řízení Proč číslicově? Snadno se přeprogramuje (srovnej s výměnou
Doplňky k přednášce 23 Diskrétní systémy Diskrétní frekvenční charakteristiky
 Doplňky k přednášce 3 Dikrétní ytémy Dikrétní frekvenční charakteritiky Michael Šebek Automatické řízení 011-1-11 Automatické řízení - Kybernetika a robotika e jω Matematika: Komplexní exponenciála = coω+
Doplňky k přednášce 3 Dikrétní ytémy Dikrétní frekvenční charakteritiky Michael Šebek Automatické řízení 011-1-11 Automatické řízení - Kybernetika a robotika e jω Matematika: Komplexní exponenciála = coω+
20 - Číslicové a diskrétní řízení
 20 - Číslicové a disrétní řízení Michael Šebe Automaticé řízení 2013 22-4-14 Analogové a číslicové řízení Proč číslicově? Snadno se přeprogramuje (srovnej s výměnou rezistorů/apacitorů v analogové řídicím
20 - Číslicové a disrétní řízení Michael Šebe Automaticé řízení 2013 22-4-14 Analogové a číslicové řízení Proč číslicově? Snadno se přeprogramuje (srovnej s výměnou rezistorů/apacitorů v analogové řídicím
12 - Frekvenční metody
 12 - Frekvenční metody Michael Šebek Automatické řízení 218 28-3-18 Proč frekvenční metody? Řídicích systémy se posuzují z časových odezev na určité vstupní signály Naopak v komunikačních systémech častěji
12 - Frekvenční metody Michael Šebek Automatické řízení 218 28-3-18 Proč frekvenční metody? Řídicích systémy se posuzují z časových odezev na určité vstupní signály Naopak v komunikačních systémech častěji
14 - Moderní frekvenční metody
 4 - Moderní frekvenční metody Michael Šebek Automatické řízení 28 4-4-8 Loop shaping: Chování pro nízké frekvence Tvar OL frekvenční charakteristiky L(s)=KD(s)G(s) určuje chování, ustálenou odchylku a
4 - Moderní frekvenční metody Michael Šebek Automatické řízení 28 4-4-8 Loop shaping: Chování pro nízké frekvence Tvar OL frekvenční charakteristiky L(s)=KD(s)G(s) určuje chování, ustálenou odchylku a
Analýza a zpracování signálů. 5. Z-transformace
 nalýa a pracování signálů 5. Z-transformace Z-tranformace je mocný nástroj použitelný pro analýu lineárních discretetime systémů Oboustranná Z-transformace X j F j x, je omplexní číslo r e r e Oboustranná
nalýa a pracování signálů 5. Z-transformace Z-tranformace je mocný nástroj použitelný pro analýu lineárních discretetime systémů Oboustranná Z-transformace X j F j x, je omplexní číslo r e r e Oboustranná
zpracování signálů - Fourierova transformace, FFT Frekvenční
 Digitální zpracování signálů - Fourierova transformace, FF Frevenční analýza 3. přednáša Jean Baptiste Joseph Fourier (768-830) Zálady experimentální mechaniy Frevenční analýza Proč se frevenční analýza
Digitální zpracování signálů - Fourierova transformace, FF Frevenční analýza 3. přednáša Jean Baptiste Joseph Fourier (768-830) Zálady experimentální mechaniy Frevenční analýza Proč se frevenční analýza
Příklady k přednášce 13 - Návrh frekvenčními metodami
 Příklady k přednášce 13 - Návrh frekvenčními metodami Michael Šebek Automatické řízení 2015 30-3-15 Nastavení šířky pásma uzavřené smyčky Na přechodové frekvenci v otevřené smyčce je (z definice) Hodnota
Příklady k přednášce 13 - Návrh frekvenčními metodami Michael Šebek Automatické řízení 2015 30-3-15 Nastavení šířky pásma uzavřené smyčky Na přechodové frekvenci v otevřené smyčce je (z definice) Hodnota
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY
 SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
SIGNÁLY A SOUSTAVY, SIGNÁLY A SYSTÉMY TEMATICKÉ OKRUHY Signály se spojitým časem Základní signály se spojitým časem (základní spojité signály) Jednotkový skok σ (t), jednotkový impuls (Diracův impuls)
Příklady k přednášce 8 - Geometrické místo kořenů aneb Root Locus
 Příklady k přednášce 8 - Geometrické místo kořenů aneb Root Locus Michael Šebek Automatické řízení 018 1-3-18 Automatické řízení - Kybernetika a robotika Pro bod na RL platí (pro nějaké K>0) KL( s) = (k
Příklady k přednášce 8 - Geometrické místo kořenů aneb Root Locus Michael Šebek Automatické řízení 018 1-3-18 Automatické řízení - Kybernetika a robotika Pro bod na RL platí (pro nějaké K>0) KL( s) = (k
Příklady k přednášce 14 - Moderní frekvenční metody
 Příklady k přednášce 4 - Moderní frekvenční metody Michael Šebek Automatické řízení 28 4-4-8 Přenosy ve ZV systému Opakování: Přenosy v uzavřené smyčce ys () = Tsrs ()() + Ssds () () Tsns ()() us () =
Příklady k přednášce 4 - Moderní frekvenční metody Michael Šebek Automatické řízení 28 4-4-8 Přenosy ve ZV systému Opakování: Přenosy v uzavřené smyčce ys () = Tsrs ()() + Ssds () () Tsns ()() us () =
Lineární a adpativní zpracování dat. 3. Lineární filtrace I: Z-transformace, stabilita
 Lineární a adpativní zpracování dat 3. Lineární filtrace I: Z-transformace, stabilita Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály, systémy, jejich vlastnosti a popis v časové
Lineární a adpativní zpracování dat 3. Lineární filtrace I: Z-transformace, stabilita Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály, systémy, jejich vlastnosti a popis v časové
4. Přednáška: Kvazi-Newtonovské metody:
 4 Přednáša: Kvazi-Newtonovsé metody: Metody s proměnnou metriou, modifiace Newtonovy metody Efetivní pro menší úlohy s hustou Hessovou maticí Newtonova metoda (opaování): f aproximujeme loálně vadraticou
4 Přednáša: Kvazi-Newtonovsé metody: Metody s proměnnou metriou, modifiace Newtonovy metody Efetivní pro menší úlohy s hustou Hessovou maticí Newtonova metoda (opaování): f aproximujeme loálně vadraticou
Opakování z předmětu TES
 Opakování z předmětu TES A3B35ARI 6..6 Vážení studenti, v následujících měsících budete každý týden z předmětu Automatické řízení dostávat domácí úkol z látky probrané v daném týdnu na přednáškách. Jsme
Opakování z předmětu TES A3B35ARI 6..6 Vážení studenti, v následujících měsících budete každý týden z předmětu Automatické řízení dostávat domácí úkol z látky probrané v daném týdnu na přednáškách. Jsme
Diskretizace. 29. dubna 2015
 MSP: Domácí příprava č. 3 Vnitřní a vnější popis diskrétních systémů Dopředná Z-transformace Zpětná Z-transformace Řešení diferenčních rovnic Stabilita diskrétních systémů Spojování systémů Diskretizace
MSP: Domácí příprava č. 3 Vnitřní a vnější popis diskrétních systémů Dopředná Z-transformace Zpětná Z-transformace Řešení diferenčních rovnic Stabilita diskrétních systémů Spojování systémů Diskretizace
X31EO2 - Elektrické obvody 2. Kmitočtové charakteristiky
 X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
X3EO - Elektrické obvody Kmitočtové charakteristiky Doc. Ing. Petr Pollák, CSc. Letní semestr 5/6!!! Volné šíření není povoleno!!! Fázory a spektra Fázor harmonického průběhu Û m = U m e jϕ ut) = U m sinωt
Flexibilita jednoduché naprogramování a přeprogramování řídícího systému
 Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Téma 40 Jiří Cigler Zadání Číslicové řízení. Digitalizace a tvarování. Diskrétní systémy a jejich vlastnosti. Řízení diskrétních systémů. Diskrétní popis spojité soustavy. Návrh emulací. Nelineární řízení.
Doplňky k přednášce 24 Diskrétní řízení Diskrétní metody analogické spojitým
 Doplňky k přednášce 24 Diskrétní řízení Diskrétní metody analogické spojitým Michael Šebek Automatické řízení 2013 21-4-13 Metody diskrétního návrhu Metody diskrétního návrhu, které jsou stejné (velmi
Doplňky k přednášce 24 Diskrétní řízení Diskrétní metody analogické spojitým Michael Šebek Automatické řízení 2013 21-4-13 Metody diskrétního návrhu Metody diskrétního návrhu, které jsou stejné (velmi
Předmět A3B31TES/Př. 7
 Předmět A3B31TES/Př. 7 PS 1 1 Katedra teorie obvodů, místnost č. 523, blok B2 Přednáška 7: Bodeho a Nyquistovy frekvenční charakteristiky PS Předmět A3B31TES/Př. 7 březen 2015 1 / 65 Obsah 1 Historie 2
Předmět A3B31TES/Př. 7 PS 1 1 Katedra teorie obvodů, místnost č. 523, blok B2 Přednáška 7: Bodeho a Nyquistovy frekvenční charakteristiky PS Předmět A3B31TES/Př. 7 březen 2015 1 / 65 Obsah 1 Historie 2
do jednotkového prostorového úhlu ve směru svírajícím úhel ϑ s osou dipólu je dán vztahem (1) a c je rychlost světla.
 a c je rychlost světla.") Induované oscilující eletricé dipóly jao zdroje rozptýleného záření Ja v lasicém, ta i v vantově-mechanicém přístupu jsou za původce rozptýleného záření považovány oscilující eletricé a magneticé multipólové
Induované oscilující eletricé dipóly jao zdroje rozptýleného záření Ja v lasicém, ta i v vantově-mechanicém přístupu jsou za původce rozptýleného záření považovány oscilující eletricé a magneticé multipólové
ÚPGM FIT VUT Brno,
 Systémy s diskrétním časem Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1 LTI systémy v tomto kursu budeme pracovat pouze se systémy lineárními a časově invariantními. Úvod k nim jsme viděli již
Systémy s diskrétním časem Jan Černocký ÚPGM FIT VUT Brno, cernocky@fit.vutbr.cz 1 LTI systémy v tomto kursu budeme pracovat pouze se systémy lineárními a časově invariantními. Úvod k nim jsme viděli již
7. ZÁKLADNÍ TYPY DYNAMICKÝCH SYSTÉMŮ
 7. ZÁKADNÍ TYPY DYNAMICKÝCH SYSTÉMŮ 7.. SPOJITÉ SYSTÉMY Téměř všechny fyzálně realzovatelné spojté lneární systémy (romě systémů s dopravním zpožděním lze vytvořt z prvů tří typů: proporconálních členů
7. ZÁKADNÍ TYPY DYNAMICKÝCH SYSTÉMŮ 7.. SPOJITÉ SYSTÉMY Téměř všechny fyzálně realzovatelné spojté lneární systémy (romě systémů s dopravním zpožděním lze vytvořt z prvů tří typů: proporconálních členů
teorie elektronických obvodů Jiří Petržela obvodové funkce
 Jiří Petržela obvod jako dvojbran dvojbranem rozumíme elektronický obvod mající dvě brány (vstupní a výstupní) dvojbranem může být zesilovač, pasivní i aktivní filtr, tranzistor v některém zapojení, přenosový
Jiří Petržela obvod jako dvojbran dvojbranem rozumíme elektronický obvod mající dvě brány (vstupní a výstupní) dvojbranem může být zesilovač, pasivní i aktivní filtr, tranzistor v některém zapojení, přenosový
Příklady k přednášce 5 - Identifikace
 Příklady k přednášce 5 - Identifikace Michael Šebek Automatické řízení 07 5-3-7 Jiná metoda pro. řád bez nul kmitavý Hledáme ωn Gs () k s + ζωn s + ωn Aplikujeme u( ) us () s. Změříme y( ), A, A, Td y(
Příklady k přednášce 5 - Identifikace Michael Šebek Automatické řízení 07 5-3-7 Jiná metoda pro. řád bez nul kmitavý Hledáme ωn Gs () k s + ζωn s + ωn Aplikujeme u( ) us () s. Změříme y( ), A, A, Td y(
Příklady: - počet členů dané domácnosti - počet zákazníků ve frontě - počet pokusů do padnutí čísla šest - životnost televizoru - věk člověka
 Náhodná veličina Náhodnou veličinou nazýváme veličinu, terá s určitými p-stmi nabývá reálných hodnot jednoznačně přiřazených výsledům příslušných náhodných pousů Náhodné veličiny obvyle dělíme na dva záladní
Náhodná veličina Náhodnou veličinou nazýváme veličinu, terá s určitými p-stmi nabývá reálných hodnot jednoznačně přiřazených výsledům příslušných náhodných pousů Náhodné veličiny obvyle dělíme na dva záladní
Křivkové integrály prvního druhu Vypočítejte dané křivkové integrály prvního druhu v R 2.
 Křivové integrál prvního druhu Vpočítejte dané řivové integrál prvního druhu v R. Přílad. ds x, de je úseča AB, A[, ], B[4, ]. Řešení: Pro řivový integrál prvního druhu platí: fx, ) ds β α fϕt), ψt)) ϕ
Křivové integrál prvního druhu Vpočítejte dané řivové integrál prvního druhu v R. Přílad. ds x, de je úseča AB, A[, ], B[4, ]. Řešení: Pro řivový integrál prvního druhu platí: fx, ) ds β α fϕt), ψt)) ϕ
je amplituda indukovaného dipólového momentu s frekvencí ω
 Induované oscilující eletricé dipóly jao zdroje rozptýleného záření Ja v lasicém, ta i v vantově-mechanicém přístupu jsou za původce rozptýleného záření považovány oscilující eletricé a magneticé multipólové
Induované oscilující eletricé dipóly jao zdroje rozptýleného záření Ja v lasicém, ta i v vantově-mechanicém přístupu jsou za původce rozptýleného záření považovány oscilující eletricé a magneticé multipólové
24 - Diskrétní řízení
 24 - Diskrétní řízení Michael Šebek Automatické řízení 213 13-5-14 Metody návrhu diskrétního řízení Automatické řízení - Kybernetika a robotika Návrh pro čistě diskrétní systémy Mnohé metody jsou analogické
24 - Diskrétní řízení Michael Šebek Automatické řízení 213 13-5-14 Metody návrhu diskrétního řízení Automatické řízení - Kybernetika a robotika Návrh pro čistě diskrétní systémy Mnohé metody jsou analogické
Systé my, procesy a signály I - sbírka příkladů
 Systé my, procesy a signály I - sbíra příladů Ř EŠEÉPŘ ÍKLADY r 6 Urč ete amplitudu, opaovací periodu, opaovací mitoč et a počáteč ní fázi disrétních harmonicých signálů a) s( ) = cos π, b) s ( ) 6 = π
Systé my, procesy a signály I - sbíra příladů Ř EŠEÉPŘ ÍKLADY r 6 Urč ete amplitudu, opaovací periodu, opaovací mitoč et a počáteč ní fázi disrétních harmonicých signálů a) s( ) = cos π, b) s ( ) 6 = π
PŘEDNÁŠKA 9 KŘIVKOVÝ A PLOŠNÝ INTEGRÁL 1. DRUHU
 PŘEDNÁŠKA 9 KŘIVKOVÝ A PLOŠNÝ INTEGRÁL 1. DRUHU 6.1 Křivkový integrál 1. druhu Definice 1. Množina R n se nazývá prostá regulární křivka v R n právě tehdy, když existuje vzájemně jednoznačné zobrazení
PŘEDNÁŠKA 9 KŘIVKOVÝ A PLOŠNÝ INTEGRÁL 1. DRUHU 6.1 Křivkový integrál 1. druhu Definice 1. Množina R n se nazývá prostá regulární křivka v R n právě tehdy, když existuje vzájemně jednoznačné zobrazení
Analýza lineárních regulačních systémů v časové doméně. V Modelice (ale i v Simulinku) máme blok TransfeFunction
 máme blok TransfeFunction") Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Analýza lineárních regulačních systémů v časové doméně V Modelice (ale i v Simulinku) máme blok TransfeFunction Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control
Frekvenční charakteristiky
 Frekvenční charakteristiky EO2 Přednáška Pavel Máša ÚVODEM Frekvenční charakteristiky popisují závislost poměru amplitudy výstupního ku vstupnímu napětí a jejich fázový posun v závislosti na frekvenci
Frekvenční charakteristiky EO2 Přednáška Pavel Máša ÚVODEM Frekvenční charakteristiky popisují závislost poměru amplitudy výstupního ku vstupnímu napětí a jejich fázový posun v závislosti na frekvenci
Západočeská univerzita v Plzni Fakulta aplikovaných věd KKY/LS2. Plzeň, 2008 Pavel Jedlička
 Západočeská univerzita v Plzni Fakulta aplikovaných věd KKY/LS2 Semestrální práce Plzeň, 2008 Jan Krčmář Pavel Jedlička 1 Měřený model Je zadán systém (1), který budeme diskretizovat použitím funkce c2d
Západočeská univerzita v Plzni Fakulta aplikovaných věd KKY/LS2 Semestrální práce Plzeň, 2008 Jan Krčmář Pavel Jedlička 1 Měřený model Je zadán systém (1), který budeme diskretizovat použitím funkce c2d
MOMENT SETRVAČNOSTI. Obecná část Pomocí Newtonova pohybového zákona síly můžeme odvodit pohybovou rovnici pro rotační pohyb:
 MOMENT SETRVAČNOST Obecná část Pomocí Newtonova pohybového záona síly můžeme odvodit pohybovou rovnici pro rotační pohyb: dω M = = ε, (1) d t de M je moment vnější síly působící na těleso, ω úhlová rychlost,
MOMENT SETRVAČNOST Obecná část Pomocí Newtonova pohybového záona síly můžeme odvodit pohybovou rovnici pro rotační pohyb: dω M = = ε, (1) d t de M je moment vnější síly působící na těleso, ω úhlová rychlost,
MATEMATIKA II - vybrané úlohy ze zkoušek ( 2015)
") MATEMATIKA II - vybrané úlohy ze zkoušek ( 2015 doplněné o další úlohy 13. 4. 2015 Nalezené nesrovnalosti ve výsledcích nebo připomínky k tomuto souboru sdělte laskavě F. Mrázovi ( e-mail: Frantisek.Mraz@fs.cvut.cz.
MATEMATIKA II - vybrané úlohy ze zkoušek ( 2015 doplněné o další úlohy 13. 4. 2015 Nalezené nesrovnalosti ve výsledcích nebo připomínky k tomuto souboru sdělte laskavě F. Mrázovi ( e-mail: Frantisek.Mraz@fs.cvut.cz.
3. Mocninné a Taylorovy řady
 3. Mocninné a Taylorovy řady A. Záladní pojmy. Obor onvergence Mocninné řady jsou nejjednodušším speciálním případem funčních řad. Jsou to funční řady, jejichž členy jsou mocninné funce. V této apitole
3. Mocninné a Taylorovy řady A. Záladní pojmy. Obor onvergence Mocninné řady jsou nejjednodušším speciálním případem funčních řad. Jsou to funční řady, jejichž členy jsou mocninné funce. V této apitole
26 Nelineární systémy a řízení
 6 Nelineární systémy a řízení Michael Šebek Automatické řízení 016 18-5-16 Lineární vs. nelineární Reálné systémy jsou většinou (ne vždy) nelineární, při relativně malých signálech (výchylkách) je často
6 Nelineární systémy a řízení Michael Šebek Automatické řízení 016 18-5-16 Lineární vs. nelineární Reálné systémy jsou většinou (ne vždy) nelineární, při relativně malých signálech (výchylkách) je často
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
KMA/P506 Pravděpodobnost a statistika KMA/P507 Statistika na PC
 Přednáša 02 Přírodovědecá faulta Katedra matematiy KMA/P506 Pravděpodobnost a statistia KMA/P507 Statistia na PC jiri.cihlar@ujep.cz Náhodné veličiny Záladní definice Nechť je dán pravděpodobnostní prostor
Přednáša 02 Přírodovědecá faulta Katedra matematiy KMA/P506 Pravděpodobnost a statistia KMA/P507 Statistia na PC jiri.cihlar@ujep.cz Náhodné veličiny Záladní definice Nechť je dán pravděpodobnostní prostor
ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ
 VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 203 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
VYSOKÁ ŠKOLA BÁŇSKÁ TECHNICKÁ UNIVERZITA OSTRAVA FAKULTA STROJNÍ ZÁKLADY AUTOMATICKÉHO ŘÍZENÍ. týden doc. Ing. Renata WAGNEROVÁ, Ph.D. Ostrava 203 doc. Ing. Renata WAGNEROVÁ, Ph.D. Vysoká škola báňská
Funkce jedn e re aln e promˇ enn e Derivace Pˇredn aˇska ˇr ıjna 2015
 Funkce jedné reálné proměnné Derivace Přednáška 2 15. října 2015 Obsah 1 Funkce 2 Limita a spojitost funkce 3 Derivace 4 Průběh funkce Informace Literatura v elektronické verzi (odkazy ze STAGu): 1 Lineární
Funkce jedné reálné proměnné Derivace Přednáška 2 15. října 2015 Obsah 1 Funkce 2 Limita a spojitost funkce 3 Derivace 4 Průběh funkce Informace Literatura v elektronické verzi (odkazy ze STAGu): 1 Lineární
Poznámky k Fourierově transformaci
 Poznámky k Fourierově transformaci V těchto poznámkách jsou uvedeny základní vlastnosti jednorozměrné Fourierovy transformace a její aplikace na jednoduché modelové případy. Pro určitost jsou sdružené
Poznámky k Fourierově transformaci V těchto poznámkách jsou uvedeny základní vlastnosti jednorozměrné Fourierovy transformace a její aplikace na jednoduché modelové případy. Pro určitost jsou sdružené
MOMENT SETRVAČNOSTI. Obecná část Pomocí Newtonova pohybového zákona síly můžeme odvodit pohybovou rovnici pro rotační pohyb:
 MOMENT SETRVAČNOST Obecná část Pomocí Newtonova pohybového záona síly můžeme odvodit pohybovou rovnici pro rotační pohyb: dω M = = ε, (1) d t de M je moment vnější síly působící na těleso, ω úhlová rychlost,
MOMENT SETRVAČNOST Obecná část Pomocí Newtonova pohybového záona síly můžeme odvodit pohybovou rovnici pro rotační pohyb: dω M = = ε, (1) d t de M je moment vnější síly působící na těleso, ω úhlová rychlost,
Statická analýza fyziologických systémů
 Statická analýza fyziologických systémů Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control Systems Chapter 3 Static Analysis of Physiological Systems Statická analýzy
Statická analýza fyziologických systémů Studijní materiály http://physiome.cz/atlas/sim/regulacesys/ Khoo: Physiological Control Systems Chapter 3 Static Analysis of Physiological Systems Statická analýzy
Lineární a adaptivní zpracování dat. 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně
 Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Lineární a adaptivní zpracování dat 2. SYSTÉMY a jejich popis v časové doméně a frekvenční doméně Daniel Schwarz Investice do rozvoje vzdělávání Osnova Opakování: signály a systémy Vlastnosti systémů Systémy
Reciprokou funkci znáte ze základní školy pod označením nepřímá úměra.
 @091 7. Reciproá funce Reciproou funci znáte ze záladní šoly pod označením nepřímá úměra. Definice: Reciproá funce je dána předpisem ( 0 je reálné číslo) f : y R \ {0} A) Definiční obor funce: Je třeba
@091 7. Reciproá funce Reciproou funci znáte ze záladní šoly pod označením nepřímá úměra. Definice: Reciproá funce je dána předpisem ( 0 je reálné číslo) f : y R \ {0} A) Definiční obor funce: Je třeba
Vícerozměrná rozdělení
 Vícerozměrná rozdělení 7. září 0 Učivo: Práce s vícerozměrnými rozděleními. Sdružené, marginální, podmíněné rozdělení pravděpodobnosti. Vektorová střední hodnota. Kovariance, korelace, kovarianční matice.
Vícerozměrná rozdělení 7. září 0 Učivo: Práce s vícerozměrnými rozděleními. Sdružené, marginální, podmíněné rozdělení pravděpodobnosti. Vektorová střední hodnota. Kovariance, korelace, kovarianční matice.
PRAVDĚPODOBNOST A STATISTIKA
 PRAVDĚPODOBNOST A STATISTIKA Číselné charateristiy náhodných proměnných Charateristiy náhodných proměnných dělíme nejčastěji na charateristiy polohy a variability. Mezi charateristiy polohy se nejčastěji
PRAVDĚPODOBNOST A STATISTIKA Číselné charateristiy náhodných proměnných Charateristiy náhodných proměnných dělíme nejčastěji na charateristiy polohy a variability. Mezi charateristiy polohy se nejčastěji
Nalezněte hladiny následujících funkcí. Pro které hodnoty C R jsou hladiny neprázdné
 . Definiční obor a hladiny funkce více proměnných Nalezněte a graficky znázorněte definiční obor D funkce f = f(x, y), kde a) f(x, y) = x y, b) f(x, y) = log(xy + ), c) f(x, y) = xy, d) f(x, y) = log(x
. Definiční obor a hladiny funkce více proměnných Nalezněte a graficky znázorněte definiční obor D funkce f = f(x, y), kde a) f(x, y) = x y, b) f(x, y) = log(xy + ), c) f(x, y) = xy, d) f(x, y) = log(x
Předpoklady: a, b spojité na intervalu I.
 Diferenciální rovnice Obyčejná diferenciální rovnice řádu n: F t, x, x, x,, x n Řešení na intervalu I: funce x : I R taová, že pro aždé t I je F t, xt, x t,, x n t Maximální řešení: neexistuje řešení na
Diferenciální rovnice Obyčejná diferenciální rovnice řádu n: F t, x, x, x,, x n Řešení na intervalu I: funce x : I R taová, že pro aždé t I je F t, xt, x t,, x n t Maximální řešení: neexistuje řešení na
Fourierova transformace
 Fourierova transformace Jean Baptiste Joseph Fourier (768-83) Jeho obdivovatel (nedatováno) Opáčko harmonických signálů Spojitý harmonický signál ( ) = cos( ω + ϕ ) x t C t C amplituda ω úhlová frekvence
Fourierova transformace Jean Baptiste Joseph Fourier (768-83) Jeho obdivovatel (nedatováno) Opáčko harmonických signálů Spojitý harmonický signál ( ) = cos( ω + ϕ ) x t C t C amplituda ω úhlová frekvence
7.1. Číslicové filtry IIR
 Kapitola 7. Návrh číslicových filtrů Hraniční kmitočty propustného a nepropustného pásma jsou ve většině případů specifikovány v[hz] společně se vzorkovacím kmitočtem číslicového filtru. Návrhové algoritmy
Kapitola 7. Návrh číslicových filtrů Hraniční kmitočty propustného a nepropustného pásma jsou ve většině případů specifikovány v[hz] společně se vzorkovacím kmitočtem číslicového filtru. Návrhové algoritmy
Zpětná vazba, změna vlastností systému. Petr Hušek
 Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Zpětná vazba, změna vlastností systému etr Hušek Zpětná vazba, změna vlastností systému etr Hušek husek@fel.cvut.cz katedra řídicí techniky Fakulta elektrotechnická ČVUT v raze MAS 2012/13 ČVUT v raze
Klasické pokročilé techniky automatického řízení
 Klasické pokročilé techniky automatického řízení Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Klasické pokročilé techniky automatického řízení Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
5. cvičení z Matematiky 2
 5. cvičení z Matematiky 2 21.-25. března 2016 5.1 Nalezněte úhel, který v bodě 1, 0, 0 svírají grafy funkcí fx, y ln x 2 + y 2 a gx, y sinxy. Úhel, který svírají grafy funkcí je dán jako úhel mezi jednotlivými
5. cvičení z Matematiky 2 21.-25. března 2016 5.1 Nalezněte úhel, který v bodě 1, 0, 0 svírají grafy funkcí fx, y ln x 2 + y 2 a gx, y sinxy. Úhel, který svírají grafy funkcí je dán jako úhel mezi jednotlivými
CW01 - Teorie měření a regulace
 Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Ústav technologie, mechanizace a řízení staveb CW01 - Teorie měření a regulace ZS 2010/2011 SPEC. 2.p 2010 - Ing. Václav Rada, CSc. Ústav technologie, mechanizace a řízení staveb Teorie měření a regulace
Transformujte diferenciální výraz x f x + y f do polárních souřadnic r a ϕ, které jsou definovány vztahy x = r cos ϕ a y = r sin ϕ.
 Ukázka 1 Necht má funkce z = f(x, y) spojité parciální derivace. Napište rovnici tečné roviny ke grafu této funkce v bodě A = [ x 0, y 0, z 0 ]. Transformujte diferenciální výraz x f x + y f y do polárních
Ukázka 1 Necht má funkce z = f(x, y) spojité parciální derivace. Napište rovnici tečné roviny ke grafu této funkce v bodě A = [ x 0, y 0, z 0 ]. Transformujte diferenciální výraz x f x + y f y do polárních
Úvodní informace. 17. února 2018
 Úvodní informace Funkce více proměnných Přednáška první 17. února 2018 Obsah 1 Úvodní informace. 2 Funkce více proměnných Definiční obor Limita a spojitost Derivace, diferencovatelnost, diferenciál Úvodní
Úvodní informace Funkce více proměnných Přednáška první 17. února 2018 Obsah 1 Úvodní informace. 2 Funkce více proměnných Definiční obor Limita a spojitost Derivace, diferencovatelnost, diferenciál Úvodní
7. Derivace složené funkce. Budeme uvažovat složenou funkci F = f(g), kde některá z jejich součástí
, kde některá z jejich součástí") 202-m3b2/cvic/7slf.tex 7. Derivace složené funkce. Budeme uvažovat složenou funkci F = fg, kde některá z jejich součástí může být funkcí více proměnných. Předpokládáme, že uvažujeme funkce, které mají
202-m3b2/cvic/7slf.tex 7. Derivace složené funkce. Budeme uvažovat složenou funkci F = fg, kde některá z jejich součástí může být funkcí více proměnných. Předpokládáme, že uvažujeme funkce, které mají
Modelování a simulace regulátorů a čidel
 Modeloání a simulace regulátorů a čidel. Modeloání a simulace PI regulátoru Přenos PI regulátoru je yjádřen následujícím ztahem F( p) = ( + p ) p V Simulinu je tento blo obsažen nihoně prů. Bohužel použití
Modeloání a simulace regulátorů a čidel. Modeloání a simulace PI regulátoru Přenos PI regulátoru je yjádřen následujícím ztahem F( p) = ( + p ) p V Simulinu je tento blo obsažen nihoně prů. Bohužel použití
Youla-Kučerova parametrizace. Co to je?
 Youla-Kučerova parametrizace. Co to je? Vladimír Kučera Český institut informatiky, robotiky a kybernetiky ČVUT Ústav teorie informace a automatizace AV ČR Slavnostní přednáška při příležitosti 50 let
Youla-Kučerova parametrizace. Co to je? Vladimír Kučera Český institut informatiky, robotiky a kybernetiky ČVUT Ústav teorie informace a automatizace AV ČR Slavnostní přednáška při příležitosti 50 let
Metoda konjugovaných gradientů
 0 Metoda onjugovaných gradientů Ludě Kučera MFF UK 11. ledna 2017 V tomto textu je popsáno, ja metodou onjugovaných gradientů řešit soustavu lineárních rovnic Ax = b, de b je daný vetor a A je symetricá
0 Metoda onjugovaných gradientů Ludě Kučera MFF UK 11. ledna 2017 V tomto textu je popsáno, ja metodou onjugovaných gradientů řešit soustavu lineárních rovnic Ax = b, de b je daný vetor a A je symetricá
MKI Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0.
 má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0.") MKI -00 Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0. V jakém rozmezí se může pohybovat poloměr konvergence regulární
MKI -00 Funkce f(z) má singularitu v bodě 0. a) Stanovte oblast, ve které konverguje hlavní část Laurentova rozvoje funkce f(z) v bodě 0. V jakém rozmezí se může pohybovat poloměr konvergence regulární
Transformátory. Mění napětí, frekvence zůstává
 Transformátory Mění napětí, frevence zůstává Princip funce Maxwell-Faradayův záon o induovaném napětí e u i d dt N d dt Jednofázový transformátor Vstupní vinutí Magneticý obvod Φ h0 u u i0 N i 0 N u i0
Transformátory Mění napětí, frevence zůstává Princip funce Maxwell-Faradayův záon o induovaném napětí e u i d dt N d dt Jednofázový transformátor Vstupní vinutí Magneticý obvod Φ h0 u u i0 N i 0 N u i0
KYBERNETIKA. Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava
 KYBERNETIKA Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava 28 . ÚVOD DO TECHNICKÉ KYBERNETIKY... 5 Co je to kybernetika... 5 Řídicí systémy... 6 Základní pojmy z teorie
KYBERNETIKA Prof. Ing. Vilém Srovnal, CSc. Vysoká škola báňská Technická univerzita Ostrava 28 . ÚVOD DO TECHNICKÉ KYBERNETIKY... 5 Co je to kybernetika... 5 Řídicí systémy... 6 Základní pojmy z teorie
Nespojité (dvou- a třípolohové ) regulátory
 regulátory") Nespojité (dvou- a třípolohové ) regulátory Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Nespojité (dvou- a třípolohové ) regulátory Jaroslav Hlava TECHNICKÁ UNIVERZITA V LIBERCI Fakulta mechatroniky, informatiky a mezioborových studií Tento materiál vznikl v rámci projektu ESF CZ.1.07/2.2.00/07.0247,
Impedanční děliče - příklady
 Impedanční děliče - příklady Postup řešení: Vyznačení impedancí, tvořících dělič Z Z : podélná impedance, mezi svorkami a Z : příčná impedance, mezi svorkami a ' ' Z ' Obecné vyjádření impedancí nebo admitancí
Impedanční děliče - příklady Postup řešení: Vyznačení impedancí, tvořících dělič Z Z : podélná impedance, mezi svorkami a Z : příčná impedance, mezi svorkami a ' ' Z ' Obecné vyjádření impedancí nebo admitancí
13 - Návrh frekvenčními metodami
 3 - Návrh frekvenčními metodami Michael Šebek Automatické říení 208 28-3-8 Návrh pomocí Bodeho grafu Automatické říení - Kybernetika a robotika Návrh probíhá v OL s konečným cílem lepšit stabilitu a chování
3 - Návrh frekvenčními metodami Michael Šebek Automatické říení 208 28-3-8 Návrh pomocí Bodeho grafu Automatické říení - Kybernetika a robotika Návrh probíhá v OL s konečným cílem lepšit stabilitu a chování
Příloha č. 1. amplitudová charakteristika filtru fázová charakteristika filtru / frekvence / Hz. 1. Určení proudové hustoty
 Příloha č. 1 Při hodnocení expozice nízkofrekvenčnímu elektromagnetickému poli (0 Hz 10 MHz) je určující veličinou modifikovaná proudová hustota J mod indukovaná v tělesné tkáni. Jak je uvedeno v nařízení
Příloha č. 1 Při hodnocení expozice nízkofrekvenčnímu elektromagnetickému poli (0 Hz 10 MHz) je určující veličinou modifikovaná proudová hustota J mod indukovaná v tělesné tkáni. Jak je uvedeno v nařízení
- Pokud máme na množině V zvoleno pevné očíslování vrcholů, můžeme váhovou funkci jednoznačně popsat. Symbolem ( i)
") DSM2 C 8 Problém neratší cesty Ohodnocený orientoaný graf: - Definice: Ohodnoceným orientoaným grafem na množině rcholů V = { 1, 2,, n} nazýáme obet G = V, w, de zobrazení w : V V R { } se nazýá áhoá funce
DSM2 C 8 Problém neratší cesty Ohodnocený orientoaný graf: - Definice: Ohodnoceným orientoaným grafem na množině rcholů V = { 1, 2,, n} nazýáme obet G = V, w, de zobrazení w : V V R { } se nazýá áhoá funce
MATEMATIKA II - vybrané úlohy ze zkoušek v letech
 MATEMATIKA II - vybrané úlohy ze zkoušek v letech 2009 2012 doplněné o další úlohy 3. část KŘIVKOVÉ INTEGRÁLY, GREENOVA VĚTA, POTENIÁLNÍ POLE, PLOŠNÉ INTEGRÁLY, GAUSSOVA OSTROGRADSKÉHO VĚTA 7. 4. 2013
MATEMATIKA II - vybrané úlohy ze zkoušek v letech 2009 2012 doplněné o další úlohy 3. část KŘIVKOVÉ INTEGRÁLY, GREENOVA VĚTA, POTENIÁLNÍ POLE, PLOŠNÉ INTEGRÁLY, GAUSSOVA OSTROGRADSKÉHO VĚTA 7. 4. 2013
FUNKCE A JEJICH VLASTNOSTI
 PŘEDNÁŠKA 3 FUNKCE A JEJICH VLASTNOSTI Pojem zobrazení a funkce Uvažujme libovolné neprázdné množiny A, B. Přiřadíme-li každému prvku x A právě jeden prvek y B, dostáváme množinu F uspořádaných dvojic
PŘEDNÁŠKA 3 FUNKCE A JEJICH VLASTNOSTI Pojem zobrazení a funkce Uvažujme libovolné neprázdné množiny A, B. Přiřadíme-li každému prvku x A právě jeden prvek y B, dostáváme množinu F uspořádaných dvojic
Funkční měniče. A. Na předloženém aproximačním funkčním měniči s operačním zesilovačem realizujícím funkci danou tabulkou:
 Funční měniče. Zadání: A. Na předloženém aproximačním funčním měniči s operačním zesilovačem realizujícím funci danou tabulou: proveďte: U / V / V a) pomocí oscilosopu měnič nastavte b) změřte na něm jeho
Funční měniče. Zadání: A. Na předloženém aproximačním funčním měniči s operačním zesilovačem realizujícím funci danou tabulou: proveďte: U / V / V a) pomocí oscilosopu měnič nastavte b) změřte na něm jeho
Vypracoval: Mgr. Lukáš Bičík TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY
 Vlastnosti funkcí Vypracoval: Mgr. Lukáš Bičík TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY Definiční obor Definiční obor funkce je množina všech čísel,
Vlastnosti funkcí Vypracoval: Mgr. Lukáš Bičík TENTO PROJEKT JE SPOLUFINANCOVÁN EVROPSKÝM SOCIÁLNÍM FONDEM A STÁTNÍM ROZPOČTEM ČESKÉ REPUBLIKY Definiční obor Definiční obor funkce je množina všech čísel,
Osnova přednášky. Univerzita Jana Evangelisty Purkyně Základy automatizace Stabilita regulačního obvodu
 Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
Osnova přednášky 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Vlastnosti členů regulačních obvodů 6) Vlastnosti regulátorů 7) 8) Kvalita
1. Signá ly se souvislým časem
 . igná ly se souvislým časem ELEKTRICKÉ IGNÁ LY Komuniace mezi lidmi - ať už přímá nebo zprostředovaná stroji - je založena na přenosu informace. Informace je produována zdrojem obvyle v neeletricé podobě,
. igná ly se souvislým časem ELEKTRICKÉ IGNÁ LY Komuniace mezi lidmi - ať už přímá nebo zprostředovaná stroji - je založena na přenosu informace. Informace je produována zdrojem obvyle v neeletricé podobě,
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností
 Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
Automatizace je proces při němž je řídicí funkce člověka nahrazována činností různých přístrojů a zařízení. (Mechanizace, Automatizace, Komplexní automatizace) Kybernetika je Věda, která zkoumá obecné
OPTIMALIZACE PARAMETRŮ PID REGULÁTORU POMOCÍ GA TOOLBOXU
 OPTMALZACE PARAMETRŮ PD REGULÁTORU POMOCÍ GA TOOLBOXU Radomil Matouše, Stanislav Lang Department of Applied Computer Science Faculty of Mechanical Engineering, Brno University of Technology Abstrat Tento
OPTMALZACE PARAMETRŮ PD REGULÁTORU POMOCÍ GA TOOLBOXU Radomil Matouše, Stanislav Lang Department of Applied Computer Science Faculty of Mechanical Engineering, Brno University of Technology Abstrat Tento
Buckinghamův Π-teorém (viz Barenblatt, Scaling, 2003)
") Bucinghamův Π-teorém (viz Barenblatt, Scaling, 2003) Formalizace rozměrové analýzy ( výsledné jednoty na obou stranách musí souhlasit ). Rozměr fyziální veličiny Mějme nějaou třídu jednote, napřílad [(g,
Bucinghamův Π-teorém (viz Barenblatt, Scaling, 2003) Formalizace rozměrové analýzy ( výsledné jednoty na obou stranách musí souhlasit ). Rozměr fyziální veličiny Mějme nějaou třídu jednote, napřílad [(g,
Petr Hasil. Prvákoviny c Petr Hasil (MUNI) Úvod do infinitezimálního počtu Prvákoviny / 57
 Úvod do infinitezimálního počtu Prvákoviny / 57") Úvod do infinitezimálního počtu Petr Hasil Prvákoviny 2015 c Petr Hasil (MUNI) Úvod do infinitezimálního počtu Prvákoviny 2015 1 / 57 Obsah 1 Úvod Funkce Reálná čísla a posloupnosti Limita a spojitost
Úvod do infinitezimálního počtu Petr Hasil Prvákoviny 2015 c Petr Hasil (MUNI) Úvod do infinitezimálního počtu Prvákoviny 2015 1 / 57 Obsah 1 Úvod Funkce Reálná čísla a posloupnosti Limita a spojitost
Grafické zobrazení frekvenčních závislostí
 Grafické zobrazení frekvenčních závislostí Z minulých přednášek již víme, že impedance / admitance kapacitoru a induktoru jsou frekvenčně závislé Nyní se budeme zabývat tím, jak tato frekvenční závislost
Grafické zobrazení frekvenčních závislostí Z minulých přednášek již víme, že impedance / admitance kapacitoru a induktoru jsou frekvenčně závislé Nyní se budeme zabývat tím, jak tato frekvenční závislost
TENSOR NAPĚTÍ A DEFORMACE. Obrázek 1: Volba souřadnicového systému
 TENSOR NAPĚTÍ A DEFORMACE Obrázek 1: Volba souřadnicového systému Pole posunutí, deformace, napětí v materiálovém bodě {u} = { u v w } T (1) Obecně 9 složek pole napětí lze uspořádat do matice [3x3] -
TENSOR NAPĚTÍ A DEFORMACE Obrázek 1: Volba souřadnicového systému Pole posunutí, deformace, napětí v materiálovém bodě {u} = { u v w } T (1) Obecně 9 složek pole napětí lze uspořádat do matice [3x3] -
Základy teorie pravděpodobnosti
 Základy teorie pravděpodobnosti Náhodná veličina Roman Biskup (zapálený) statistik ve výslužbě, aktuálně analytik v praxi ;-) roman.biskup(at)email.cz 12. února 2012 Statistika by Birom Základy teorie
Základy teorie pravděpodobnosti Náhodná veličina Roman Biskup (zapálený) statistik ve výslužbě, aktuálně analytik v praxi ;-) roman.biskup(at)email.cz 12. února 2012 Statistika by Birom Základy teorie
G( x) %, ν%, λ. x, x, N, N nezáporné přídatné proměnné, ( ) 2 Matematické programování
 %, ν%, λ. x, x, N, N nezáporné přídatné proměnné, ( ) 2 Matematické programování") Matematicé programování Označení a definice veličin. opt i/maimalizace w, Žádaná hodnota,transpozice, relace typu nebo Inde diagonální formy vetoru. Obecná omezovací podmína Γ ( ( = ( Є, R, y podmíny typu
Matematicé programování Označení a definice veličin. opt i/maimalizace w, Žádaná hodnota,transpozice, relace typu nebo Inde diagonální formy vetoru. Obecná omezovací podmína Γ ( ( = ( Є, R, y podmíny typu
Kapitola 7: Neurčitý integrál. 1/14
 Kapitola 7: Neurčitý integrál. 1/14 Neurčitý integrál 2/14 Definice: Necht f je funkce definovaná na intervalu I. Funkci F definovanou na intervalu I, pro kterou platí F (x) = f (x) x I nazýváme primitivní
Kapitola 7: Neurčitý integrál. 1/14 Neurčitý integrál 2/14 Definice: Necht f je funkce definovaná na intervalu I. Funkci F definovanou na intervalu I, pro kterou platí F (x) = f (x) x I nazýváme primitivní
22. Mechanické a elektromagnetické kmity
 . Mechanicé a eletromagneticé mity. Mechanicé mity Mechanicé mitání je jev, při terém se periodicy mění fyziální veličiny popisující mitavý pohyb. Oscilátor těleso, teré je schopné mitat, (mitání způsobuje
. Mechanicé a eletromagneticé mity. Mechanicé mity Mechanicé mitání je jev, při terém se periodicy mění fyziální veličiny popisující mitavý pohyb. Oscilátor těleso, teré je schopné mitat, (mitání způsobuje
 Á É Č ď ý ý Č Ť ž ý ý ť žž Ž ý ú ž š ý ž ž ž š š š ý Š ť ý ý š ž ž ý ž ž Ň ý ž ť ť ú ž ý š ž š ž ž š ž š ž ý ý šť ý Ý Ú ň ý ý Ý ž ý ý ť ý ž ý ý ž ý ď ý ý š ý ž ú ú ď ý ž š ž ý ž ť ý ý ý ý ý Á ý ď ž š ž
Á É Č ď ý ý Č Ť ž ý ý ť žž Ž ý ú ž š ý ž ž ž š š š ý Š ť ý ý š ž ž ý ž ž Ň ý ž ť ť ú ž ý š ž š ž ž š ž š ž ý ý šť ý Ý Ú ň ý ý Ý ž ý ý ť ý ž ý ý ž ý ď ý ý š ý ž ú ú ď ý ž š ž ý ž ť ý ý ý ý ý Á ý ď ž š ž
Uzavřené a otevřené množiny
 Teorie: Uzavřené a otevřené množiny 2. cvičení DEFINICE Nechť M R n. Bod x M nazveme vnitřním bodem množiny M, pokud existuje r > 0 tak, že B(x, r) M. Množinu všech vnitřních bodů značíme Int M. Dále,
Teorie: Uzavřené a otevřené množiny 2. cvičení DEFINICE Nechť M R n. Bod x M nazveme vnitřním bodem množiny M, pokud existuje r > 0 tak, že B(x, r) M. Množinu všech vnitřních bodů značíme Int M. Dále,
KTE/TEVS - Rychlá Fourierova transformace. Pavel Karban. Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni
 KTE/TEVS - Rychlá Fourierova transformace Pavel Karban Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni 10.11.011 Outline 1 Motivace FT Fourierova transformace
KTE/TEVS - Rychlá Fourierova transformace Pavel Karban Katedra teoretické elektrotechniky Fakulta elektrotechnická Západočeská univerzita v Plzni 10.11.011 Outline 1 Motivace FT Fourierova transformace
7.1 Extrémy a monotonie
 KAPITOLA 7: Průběh funkce [ZMA13-P38] 7.1 Extrémy a monotonie Řekneme, že funkce f nabývá na množině M Df svého globálního maxima globálního minima A v bodě x 0, jestliže x 0 M, fx 0 = A a pro každé x
KAPITOLA 7: Průběh funkce [ZMA13-P38] 7.1 Extrémy a monotonie Řekneme, že funkce f nabývá na množině M Df svého globálního maxima globálního minima A v bodě x 0, jestliže x 0 M, fx 0 = A a pro každé x
Úvod. Integrování je inverzní proces k derivování Máme zderivovanou funkci a integrací získáme původní funkci kterou jsme derivovali
 NEURČITÝ INTEGRÁL Úvod Integrování je inverzní proces k derivování Máme zderivovanou funkci a integrací získáme původní funkci kterou jsme derivovali Umět pracovat s integrálním počtem Je důležité pro
NEURČITÝ INTEGRÁL Úvod Integrování je inverzní proces k derivování Máme zderivovanou funkci a integrací získáme původní funkci kterou jsme derivovali Umět pracovat s integrálním počtem Je důležité pro
Nauka o Kmitání Přednáška č. 4
 Nauka o Kmitání Přednáška č. 4 Odezva lineárního systému na obecnou periodickou budící funkci Ing. Antonín Skarolek, Ph.D. Katedra mechaniky, pružnosti a pevnosti Technická Univerzita v Liberci 213 Ustálená
Nauka o Kmitání Přednáška č. 4 Odezva lineárního systému na obecnou periodickou budící funkci Ing. Antonín Skarolek, Ph.D. Katedra mechaniky, pružnosti a pevnosti Technická Univerzita v Liberci 213 Ustálená
Lineární pohon s kuličkovým šroubem
 Veličiny Veličiny Všeobecně Název Typ Znača Jednota Poznáma ineární pohon s uličovým šroubem OSP-E..SB Upevnění viz výresy Rozsah teplot ϑ min C -20 ϑ max C +80 ineární pohon s uličovým šroubem Série OSP-E..SB
Veličiny Veličiny Všeobecně Název Typ Znača Jednota Poznáma ineární pohon s uličovým šroubem OSP-E..SB Upevnění viz výresy Rozsah teplot ϑ min C -20 ϑ max C +80 ineární pohon s uličovým šroubem Série OSP-E..SB
Hodnocení přesnosti výsledků z metody FMECA
 Hodnocení přesnosti výsledů z metody FMECA Josef Chudoba 1. Úvod Metoda FMECA je semivantitativní metoda, pomocí teré se identifiují poruchy s významnými důsledy ovlivňující funci systému. Závažnost následů
Hodnocení přesnosti výsledů z metody FMECA Josef Chudoba 1. Úvod Metoda FMECA je semivantitativní metoda, pomocí teré se identifiují poruchy s významnými důsledy ovlivňující funci systému. Závažnost následů
Difuze v procesu hoření
 Difuze v procesu hoření Fyziální podmíny hoření Záladní podmínou nepřetržitého průběhu spalovací reace je přívod reagentů (paliva a vzduchu) do ohniště a zároveň odvod produtů hoření (spalin). Pro dosažení
Difuze v procesu hoření Fyziální podmíny hoření Záladní podmínou nepřetržitého průběhu spalovací reace je přívod reagentů (paliva a vzduchu) do ohniště a zároveň odvod produtů hoření (spalin). Pro dosažení
Vlastnosti členů regulačních obvodů Osnova kurzu
 Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Statické vlastnosti členů regulačních obvodů 6) Dynamické vlastnosti členů
Osnova kurzu 1) Základní pojmy; algoritmizace úlohy 2) Teorie logického řízení 3) Fuzzy logika 4) Algebra blokových schémat 5) Statické vlastnosti členů regulačních obvodů 6) Dynamické vlastnosti členů
Matematika I A ukázkový test 1 pro 2014/2015
 Matematika I A ukázkový test 1 pro 2014/2015 1. Je dána soustava rovnic s parametrem a R x y + z = 1 x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a a) Napište Frobeniovu větu (existence i počet řešení). b)
Matematika I A ukázkový test 1 pro 2014/2015 1. Je dána soustava rovnic s parametrem a R x y + z = 1 x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a a) Napište Frobeniovu větu (existence i počet řešení). b)
Funkce s absolutní hodnotou, funkce exponenciální a funkce logaritmická
 Variace 1 Funkce s absolutní hodnotou, funkce exponenciální a funkce logaritmická Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu
Variace 1 Funkce s absolutní hodnotou, funkce exponenciální a funkce logaritmická Autor: Mgr. Jaromír JUŘEK Kopírování a jakékoliv další využití výukového materiálu je povoleno pouze s uvedením odkazu
Matematika I A ukázkový test 1 pro 2011/2012. x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a
x + (a + 1)y + z = 1 a") Matematika I A ukázkový test 1 pro 2011/2012 1. Je dána soustava rovnic s parametrem a R x y + z = 1 a) Napište Frobeniovu větu. x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a b) Vyšetřete počet řešení soustavy
Matematika I A ukázkový test 1 pro 2011/2012 1. Je dána soustava rovnic s parametrem a R x y + z = 1 a) Napište Frobeniovu větu. x + y + 3z = 1 (2a 1)x + (a + 1)y + z = 1 a b) Vyšetřete počet řešení soustavy