Transformace (2) Petr Felkel Katedra počítačové grafiky a interakce, ČVUT FEL místnost KN:E-413 (Karlovo náměstí, budova E)
|
|
|
- Milan Esterka
- před 6 lety
- Počet zobrazení:
Transkript
1 Trasormace (2) Petr Felkel Katedra počítačové graiky a iterakce, ČVUT FEL místost KN:E-43 (Karlovo áměstí, budova E) elkel@el.cvut.cz S použitím materiálů Bohuslava Hudce, Jaroslava Sloupa a Vlastimila Havraa Posledí změa:
2 Osova Opakováí trasormací z miula Trasormace (2) Projekce a viewport Homogeí souřadice Rotace podle Eulerových úhlů a Gimbal lock PGR 2
3 Logické kroky při trasormaci vrcholů 3D 2D = vrchol Modelovací a pohledová trasormace Modelovací Trasormace, Pohledová trasormace, Projekčí trasormace + Ořezáí (clippig) Perspektiví děleí Trasormace záběru (Viewport) modelovací souřadice = světové souřadice = souřadice kamery (oka) PGR ořezávácí souřadice Normalizovaé souřadice zařízeí = = = maticově Souřadice oka 3
4 Opakováí: Souřadicové soustavy v PG - daá, pozice objektů i kamery se deiuje vůči í = objekt ěkam umístěý do světa = druhý objekt umístěý jiam do světa, modelové matice matice přechodu z souřadicové soustavy světa do lokálí soustavy objektu (lokálí = globálí * ) Převádí lokálí souřadice modelu do globálích. = soustava kamery =pohledová matice = = = = PGR 4
5 Souřadice bodu objektu v růzých soustavách souřadic Souřadice bodu objektu v růzých souř. soustavách: y Rovost bází: = = = = x = = = Dvě souřadé soustavy, lišící se počátky a směry os Průměty bázových vektorů do bází PGR 5
6 Trasormace vzhledem k bázi. Trasormace maticí M vzhledem k bázi = = Trasormace vzhledem: k lokálí soustavě objektu ke světovým souřadicím k soustavě souřadic kamery PGR 6
7 Trasormace vzhledem k bázi / soustavě souřadic V soustavě : V soustavě : Zpět vůči :, = = = PGR 7
8 Aalogie s otoaparátem B. Beeš PGR 8
9 Vizualizace trasormací - zopakováí clip space ormalized space PGR 9
10 Projekčí trasormace 3D 2D vrchol x y z w modelovací souřadice Modelovací a pohledová trasormace modelovací Trasormace světové souřadice Pohledová trasormace souřadice kamery (oka) Projekčí trasormace + Ořezáí (clippig) M V P ořezávací souřadice Perspektiví děleí Normalizovaé souřadice zařízeí Trasormace záběru (Viewport) Souřadice oka PGR
11 Projekčí trasormace - P deiuje tvar pohledového objemu (viewig volume, rustrum) pohledový objem komolý jehla určuje, jak se objekt pomítá a průmětu (perspektiví či paralelí projekce) VS deiuje polohu ořezávacích rovi, tj., které objekty či jejich části budou ořízuty (clippig plaes) ixí část zadává se v souřadé soustavě kamery OpeGL umožňuje jakoukoliv projekci deiovaou uživatelem projekce obecě NENÍ aií trasormací (projekčí matice emá posledí řádek ve tvaru ) uté jsou ukce vytvářející matice pro ortograickou projekci (paralelí) perspektiví projekci PGR
12 Základ paralelího zobrazeí (ortho) viewer Projectio plae (, ) (y, ) = ear plae PGR 2
13 Základ perspektivího zobrazeí Projectio plae (, ) (y, ) viewer Similar triagles: PGR 3
14 Paralelí projekce mat4 glm::ortho( loat let, loat right, loat bottom, loat top, loat ear, loat ar); vytvoří matici pro paralelí promítáí pohledový objem je kvádr [let, bottom, *] a [right, top, *] = body a blízké a vzdáleé ořezávací roviě (* = ear a ar), jsou mapováy do dolího levého a pravého horího rohu ormátu (viewport) průměta PGR 4
15 Perspektiví projekce mat4 glm::rustum( loat let, loat right, loat bottom, loat top, loat ear, loat ar); vytvoří matici pro perspektiví promítáí pohledový objem je komolý jehla průměta podstavy rovoběžé, kolmé a vektor pohledu meší podstava = průměta objekty blíže zvětšeé (zaberou relativě větší část pohledového objemu) PGR 5
16 Perspektiví projekce mat4 glm::perspective ( loat ovy, loat aspect, loat ear, loat ar ); jiý způsob deiice parametrů pro perspektiví matici vytvoří matici pro symetrické perspektiví promítáí ovy = úhel záběru ve směru y, rozsah., spolu s ear určí h aspect je poměr šířky ku výšce pohledového objemu (w / h) w = aspect * h; hodoty ear a ar musí být kladé (ear >!!!) průměta PGR 6
17 Homogeí souřadice bod je reprezetová svými souřadicemi P = [x, y, z] t v poč. graice používáme homogeí souřadice P = [x, y, z, w] t Kartézské souřadice homogeí souřadice P = [x, y, z] t zvolit w P = [w.x, w.y, w.z, w] t příklad: bod v kartézských souřadicích [2, 3, 5] t. Jaké jsou jeho homogeí souřadice? [w.2, w.3, w.5, w] t aw apř. [2, 3, 5, ] t, [4, 6,, 2] t, atd. homogeí souřadice Kartézské souřadice P = [x, y, z, w] t P = [x/w, y/w, z/w] t w, wr příklad : bod v homogeích souřadicích [9, 3, 2, 3] t. Jaké jsou jeho kartézské souřadice? P = [9/3, 3/3, 2/3] t = [3,, 4] t Pro body volíme w = PGR 7
18 Homogeí souřadice ve 2D Geometrická iterpretace ve 2D: bodům s homogeími souřadicemi P = [w.x, w.y, w.z, w] t,w Tvoří přímku bez počátku, která je celá obrazem bodu P = [x, y, z] t x p x P Výhody homogeích souřadic Aií trasormace i projekce lze zapsat jedou maticí (ve 3D maticí 4x4) Pro body volíme w = Skládáí trasormací jako ásobeí matic Pro vektory je w = Kompaktí reprezetace bodů (w ) a vektorů (w = ) O k w [x p, y p,] t [kx p, ky p, k] t y p [w x p, w y p, w] t PGR 8 y
19 Matrices ad trasormatios h Liear trasormatio matrix Aie trasormatio matrix Perspective trasormatio matrix PGR 9
20 Trasormatios [Bitter APG] PGR 2
21 Odvozeí paralelí projekčí matice (Ortho) PGR l r l l r l r x x l r l x x x x l r l x ) ( ) ( Pricip: Zachová x a y. Igoruje z Plus ormalizace souřadic: itervaly l, rt, b,, x y z l r l r x l r x 2 b t b t y b t y 2 z Hloubku ale potřebujeme a určeí viditelosti x x r l d z y y x x M ' ' ' d 2
22 Odvozeí paralelí projekčí matice (Ortho) PGR 22 Odvozeí hloubky z ear a ar se zapisují v ortho kladě (vzdáleost od oka), jsou ale a záporé ose z, proto ve vzorcích záporé z z z z z z z z ) ( ) ( ) ( ) ( x y z z z l r l r x l r x 2 b t b t y b t y 2 z z 2 a, pokud : Platí, b t r l
23 Odvozeí paralelí projekčí matice (Ortho) Výsledá matice y z x x y z 2 r l x r l r l 2 t b yx t b t b 2 z Platí, pokud : l r, t b a PGR 23
24 Základ perspektivího zobrazeí Projectio plae (, ) (y, ) viewer Similar triagles: PGR 24
25 Odvozeí perspektiví projekčí matice (Frustum) Odvozeí X a Y Dosadíme = y = = z Plus ormalizace souřadic: x y r l 2 x r l r l t b 2 y t b t b Odvozeí dále: z x y 2 r l x r l z r l 2 t b y t b z t b 2 ( z).( z).( z) ( z) w z zx z y zz 2 r l x z r l r l 2 t b y z t b t b 2 PGR 26 z
26 Odvozeí perspektiví projekčí matice (Frustum) Mapováí hloubky Iterpoluje se /z Proto ve tvaru z z A B z Plus ormalizace souřadice z Dosadíme - -, - A A B a B - - A 2 B 2 ( z) z y Odvozeí A a B a dalším slajdu.( z) zz z 2 PGR 27
27 Odvozeí perspektiví projekčí matice (Frustum) PGR 28 B - A a / B - A Odvozeí A a B: Dosadíme - -, - A A -A A B - A - B A 2 2 B B B A A B B z A z
28 Odvozeí perspektiví projekčí matice (Frustum) Výsledá matice y Platí pokud : l r, t b a z x zx z y zz w z 2 r l x z r l r l 2 t b y z t b t b 2 PGR 29 z
29 Perspektiví děleí /w 3D 2D vrchol x y z w modelovací souřadice Modelovací a pohledová trasormace modelovací Trasormace světové souřadice Pohledová trasormace souřadice kamery (oka) Projekčí trasormace + Ořezáí (clippig) ořezové souřadice Perspektiví děleí Normalizovaé souřadice zařízeí Trasormace záběru (Viewport) Souřadice oka PGR 3
30 Divisio by w Matrix multiplicatio (rom eye to clip coordiates) = Divisio by (rom clip to ormalized coordiates) = divisio by = / / / PGR 3
31 Trasormace záběru 3D 2D vrchol x y z w modelovací souřadice Modelovací a pohledová trasormace modelovací Trasormace světové souřadice Pohledová trasormace souřadice kamery (oka) Projekčí trasormace + Ořezáí (clippig) ořezové souřadice Perspektiví děleí Normalizovaé souřadice zařízeí Trasormace záběru (Viewport) Souřadice oka PGR 32
32 Trasormace pracoviště (Viewport) Formát (viewport) = obdélíková oblast oka, do které se mapuje průměta (= promítací rovia) void glviewport( GLit x, GLit y, GLsizei width, GLsizei height); [x, y] je levý dolí roh ormátu (viewport), width a height je šířka a výška ormátu v souřadicích oka v pixelech pro kihovu GLUT se astavuje v callback ukci reshape poměr stra ormátu by měl být stejý jako poměr stra průměty jiak zkresleí obrazu GLUT: implicitě a celé oko (,,w, h) PGR 33
33 Trasormace pracoviště (Viewport) Normalizovaé souřadice zařízeí Souřadice a obrazovce x y w Viewport scree h = 2 + =+ 2 = h 2 + = =+ h 2 z w a viditelost (Z-buer) PGR 34
34 Trasormace pracoviště (maticově) Normalizovaé souřadice zařízeí h 2 + h Souřadice a obrazovce x y w Viewport =+ 2 =+ h 2 scree PGR 35 h z w a viditelost (Z-buer)
35 Trasormace pracoviště (Viewport) Dotaz a aktuálí ormát (trasormaci pracoviště) it ormat[4]; glgetitegerv( GL_VIEWPORT, ormat); Výzam: x, y, w, h x = ormat[], y = ormat[], w = ormat[2], h = ormat[3], PGR 36
36 Zachováí poměru stra obrazu aby zůstala kružice kulatá v proceduře reshape(it w, it h) registrováa jako Callback glutreshapefuc(reshape); Dva způsoby a) zmešeím ormátu b) protažeím projekce PGR 37
 // oko široké")
/2, w, w); zkresleé ezkresleé")
; x, y, w, h glviewport((w-h)/2,, h, h); w > h")
37 Zachováí poměru stra obrazu a) zmešeím ormátu - zbude evyužitá plocha oka i( w > h ) // oko široké glviewport((w-h)/2,, h, h); else // oko vysoké glviewport(, (h-w)/2, w, w); zkresleé ezkresleé zkresleé ezkresleé Nevyužitá plocha glviewport(,, w, h); x, y, w, h glviewport((w-h)/2,, h, h); w > h Nevyužitá plocha PGR w <= h 38
; else // let, right, bottom, top, ear, ar m = glm::ortho(-.5,.5, -.5/aspect,.5/aspect, -, ); glm::rustum(-.5,.5, -.5/aspect,.5/aspect,., ); Obdobě: glm::perspective(6., aspect,.")
38 Zachováí poměru stra obrazu b) protažeím projekce (zvětší se pohledový objem) GLloat aspect = (GLloat) w / (GLloat) h; i( aspect >. ) // w > h => oko široké m = glm::ortho(-.5*aspect,.5*aspect, -.5,.5, -, ); else // let, right, bottom, top, ear, ar m = glm::ortho(-.5,.5, -.5/aspect,.5/aspect, -, ); glm::rustum(-.5,.5, -.5/aspect,.5/aspect,., ); Obdobě: glm::perspective(6., aspect,., ); zkresleé ezkresleé w > h => oko široké PGRlet*aspect right*aspect 39

; aspect = 2.")
39 Aspect aspect = w / h glm::perspective(6., aspect,., ); aspect = 2.7 aspect =.5 PGR 4
40 Rotace podle Eulerových úhlů a Gimbal lock PGR 4
41 Rotace dle Eulerových úhlů Eulerovy úhly = pitch-yaw-roll (výška, kurs, rotace) komplexí otočeí rozdělíme a otočeí dle os X, Y, Z X Y Z cos() -si() si() cos() cos() si() -si() cos() cos() -si() si() cos() Rotate(,,, ) Rotate(,,, ) Rotate(,,, ) PGR 42

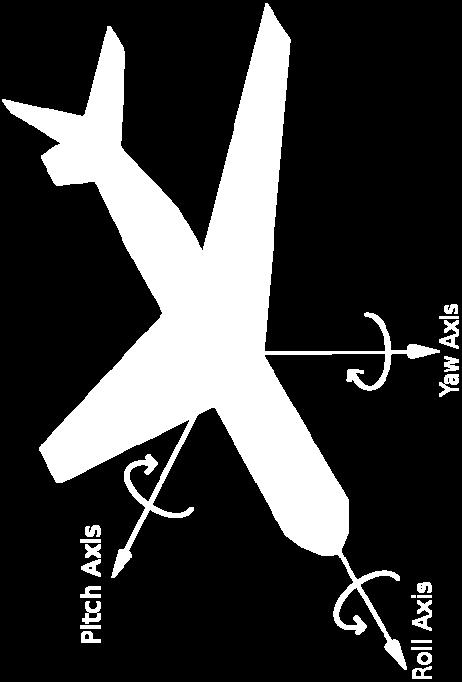
42 Základí orietace Pitch-Yaw-Roll [NASA] PGR 43

43 Základí orietace Pitch-Yaw-Roll Pitch Yaw Roll Výškovky Kormidlo Křidélka [NASA] PGR 44
![Gimbal [ džimbl] otočá podpěra -Tři gimbals](/docs-images/89/98821424/images/44-0.jpg "spojeé dohromady + závaží či setrvačík")

44 Gimbal [ džimbl] otočá podpěra -Tři gimbals spojeé dohromady + závaží či setrvačík -Původí použití u gyroskopů a upevěí kompasů, kame a skleic a lodích od atiky. [Wikipedia] PGR 45
45 Rotace a Gimbal lock [ džimbl lok] Eulerovy úhly = pitch-yaw-roll (výška, kurs, rotace) komplexí otočeí rozdělíme a otočeí podle os X, Y, Z dělá se postupě => otočeím druhé osy v hierarchii o 9 splyou osy a dojde ke ztrátě jedoho stupě volosti (gimbal lock) y y y x x 2 3 x z z z Pořadí rotací v programu: Rotate(a,,, ) // X 3 Rotate(9,,, ) // Y 2 Rotate(c,,, ) // Z Z splye s X Rotace kolem X s modelem otočeým o 9 dle Y dělá totéž, co rotace kolem Z PGR 46



46 Ztráta jedoho stupě Gimbal Lock [Wikipedia] [ PGR 47
47 Vysvětleí PGR 48
48 Vysvětleí Compositio[rax, r9y, rbz] = rax * r9y * rbz = Otočeím o 9º okolo osy Y (prostředí při skládáí trasormací) se ztratí možost otáčeí okolo osy X (osa X splye s osou Z). Místo toho se otáčí okolo osy Z původího modelu. Výsledý úhel otočeí vzike jako součet požadovaých úhlů otočeí kolem X a Z PGR 49
49 Jak ezpůsobit gimbal lock Rotaci podle obecé osy (místo skládáí rotací podle Eulerových úhlů) Používat kvaterioy (quaterios) PGR 5
Struktura scény Transformace (2)
") Struktura scéy Trasormace () Petr Felkel Katedra počítačové graiky a iterakce, ČVUT FEL místost KN:E-413 (Karlovo áměstí, budova E) E-mail: elkel@el.cvut.c S použitím materiálů Bohuslava Hudce, Jaroslava
Struktura scéy Trasormace () Petr Felkel Katedra počítačové graiky a iterakce, ČVUT FEL místost KN:E-413 (Karlovo áměstí, budova E) E-mail: elkel@el.cvut.c S použitím materiálů Bohuslava Hudce, Jaroslava
Správnost vztahu plyne z věty o rovnosti úhlů s rameny na sebe kolmými (obr. 13).
.") 37 Metrické vlastosti lieárích útvarů v E 3 Výklad Mějme v E 3 přímky p se směrovým vektorem u a q se směrovým vektorem v Zvolme libovolý bod M a veďme jím přímky p se směrovým vektorem u a q se směrovým
37 Metrické vlastosti lieárích útvarů v E 3 Výklad Mějme v E 3 přímky p se směrovým vektorem u a q se směrovým vektorem v Zvolme libovolý bod M a veďme jím přímky p se směrovým vektorem u a q se směrovým
1. Číselné obory, dělitelnost, výrazy
 1. Číselé obory, dělitelost, výrazy 1. obor přirozeých čísel - vyjadřující počet prvků možiy - začíme (jsou to kladá edesetiá čísla) 2. obor celých čísel - možia celých čísel = edesetiá, ale kladá i záporá
1. Číselé obory, dělitelost, výrazy 1. obor přirozeých čísel - vyjadřující počet prvků možiy - začíme (jsou to kladá edesetiá čísla) 2. obor celých čísel - možia celých čísel = edesetiá, ale kladá i záporá
Hardware pro počítačovou grafiku NPGR019
 Hardware pro počítačovou grafiku NPGR019 Matematika pro real-time grafiku Josef Pelikán Jan Horáček http://cgg.mff.cuni.cz/ MFF UK Praha 2012 Obsah 1 Homogenní souřadnice, maticové transformace Převod
Hardware pro počítačovou grafiku NPGR019 Matematika pro real-time grafiku Josef Pelikán Jan Horáček http://cgg.mff.cuni.cz/ MFF UK Praha 2012 Obsah 1 Homogenní souřadnice, maticové transformace Převod
Úvod Typy promítání Matematický popis promítání Implementace promítání Literatura. Promítání. Pavel Strachota. FJFI ČVUT v Praze
 Promítání Pavel Strachota FJFI ČVUT v Praze 30. března 2011 Obsah 1 Úvod 2 Typy promítání 3 Matematický popis promítání 4 Implementace promítání Obsah 1 Úvod 2 Typy promítání 3 Matematický popis promítání
Promítání Pavel Strachota FJFI ČVUT v Praze 30. března 2011 Obsah 1 Úvod 2 Typy promítání 3 Matematický popis promítání 4 Implementace promítání Obsah 1 Úvod 2 Typy promítání 3 Matematický popis promítání
Připravil: David Procházka. Projekce
 15. října 2013, Brno Připravil: David Procházka Projekce Počítačová grafika 2 Projekce Strana 2 / 38 Obsah přednášky 1 Projekce 2 Ortografická projekce 3 Perspektivní projekce 4 Nastavení pohledové matice
15. října 2013, Brno Připravil: David Procházka Projekce Počítačová grafika 2 Projekce Strana 2 / 38 Obsah přednášky 1 Projekce 2 Ortografická projekce 3 Perspektivní projekce 4 Nastavení pohledové matice
Plochy počítačové grafiky
 II Iterpolačí plochy Bezierovy pláty ad obdélíkovou a trojúhelíkovou sítí Recioálí Bezierovy pláty B-splie NURBS Kostrukce a zadáí plochy hraičí křivky sítí bodů Kiematicky vytvořeé křivky rotačí plochy
II Iterpolačí plochy Bezierovy pláty ad obdélíkovou a trojúhelíkovou sítí Recioálí Bezierovy pláty B-splie NURBS Kostrukce a zadáí plochy hraičí křivky sítí bodů Kiematicky vytvořeé křivky rotačí plochy
GRADIENTNÍ OPTICKÉ PRVKY Gradient Index Optical Components
 Nové metody a postupy v oblasti přístrojové techiky, automatického řízeí a iformatiky Ústav přístrojové a řídicí techiky ČVUT v Praze, odbor přesé mechaiky a optiky Techická 4, 66 7 Praha 6 GRADIENTNÍ
Nové metody a postupy v oblasti přístrojové techiky, automatického řízeí a iformatiky Ústav přístrojové a řídicí techiky ČVUT v Praze, odbor přesé mechaiky a optiky Techická 4, 66 7 Praha 6 GRADIENTNÍ
7. Analytická geometrie
 7. Aaltická geoetrie Studijí tet 7. Aaltická geoetrie A. Příka v roviě ϕ s A s ϕ s 2 s 1 B p s ϕ = (s1, s 2 ) sěrový vektor přík p orálový vektor přík p sěrový úhel přík p k = tgϕ = s 2 s 1 sěrice příkp
7. Aaltická geoetrie Studijí tet 7. Aaltická geoetrie A. Příka v roviě ϕ s A s ϕ s 2 s 1 B p s ϕ = (s1, s 2 ) sěrový vektor přík p orálový vektor přík p sěrový úhel přík p k = tgϕ = s 2 s 1 sěrice příkp
Obsah. skentest. 1. Úvod. 2. Metoda výpočtu Základní pojmy
 Obsah sketest 1. ÚVOD... 1 2. METODA VÝPOČTU... 1 2.1. ZÁKLADNÍ POJMY... 1 2.2. SOUŘADNICOVÉ SYSTÉMY... 2 2.3. PŘÍPRAVEK... 3 2.4. POSTUP VÝPOČTU... 4 3. PROGRAM SKENTEST... 5 3.1. VSTUPNÍ SOUBOR... 5
Obsah sketest 1. ÚVOD... 1 2. METODA VÝPOČTU... 1 2.1. ZÁKLADNÍ POJMY... 1 2.2. SOUŘADNICOVÉ SYSTÉMY... 2 2.3. PŘÍPRAVEK... 3 2.4. POSTUP VÝPOČTU... 4 3. PROGRAM SKENTEST... 5 3.1. VSTUPNÍ SOUBOR... 5
12. N á h o d n ý v ý b ě r
 12. N á h o d ý v ý b ě r Při sledováí a studiu vlastostí áhodých výsledků pozáme charakter rozděleí z toho, že opakovaý áhodý pokus ám dává za stejých podmíek růzé výsledky. Ty odpovídají hodotám jedotlivých
12. N á h o d ý v ý b ě r Při sledováí a studiu vlastostí áhodých výsledků pozáme charakter rozděleí z toho, že opakovaý áhodý pokus ám dává za stejých podmíek růzé výsledky. Ty odpovídají hodotám jedotlivých
Komplexní čísla. Definice komplexních čísel
 Komplexí čísla Defiice komplexích čísel Komplexí číslo můžeme adefiovat jako uspořádaou dvojici reálých čísel [a, b], u kterých defiujeme operace sčítáí, ásobeí, apod. Stadardě se komplexí čísla zapisují
Komplexí čísla Defiice komplexích čísel Komplexí číslo můžeme adefiovat jako uspořádaou dvojici reálých čísel [a, b], u kterých defiujeme operace sčítáí, ásobeí, apod. Stadardě se komplexí čísla zapisují
množina všech reálných čísel
 /6 FUNKCE Základí pojmy: Fukce sudá a lichá, Iverzí fukce Nepřímá úměrost, Mociá fukce, Epoeciálí fukce a rovice Logaritmus, logaritmická fukce a rovice Opakováí: Defiice fukce, graf fukce Defiičí obor,
/6 FUNKCE Základí pojmy: Fukce sudá a lichá, Iverzí fukce Nepřímá úměrost, Mociá fukce, Epoeciálí fukce a rovice Logaritmus, logaritmická fukce a rovice Opakováí: Defiice fukce, graf fukce Defiičí obor,
O Jensenově nerovnosti
 O Jeseově erovosti Petr Vodstrčil petr.vodstrcil@vsb.cz Katedra aplikovaé matematiky, Fakulta elektrotechiky a iformatiky, Vysoká škola báňská Techická uiverzita Ostrava Ostrava, 28.1. 2019 (ŠKOMAM 2019)
O Jeseově erovosti Petr Vodstrčil petr.vodstrcil@vsb.cz Katedra aplikovaé matematiky, Fakulta elektrotechiky a iformatiky, Vysoká škola báňská Techická uiverzita Ostrava Ostrava, 28.1. 2019 (ŠKOMAM 2019)
Ústav fyzikálního inženýrství Fakulta strojního inženýrství VUT v Brně GEOMETRICKÁ OPTIKA. Přednáška 10
 Ústav yzikálího ižeýrství Fakulta strojího ižeýrství VUT v Brě GEOMETRICKÁ OPTIKA Předáška 10 1 Obsah Základy geometrické (paprskové) optiky - Zobrazeí cetrovaou soustavou dvou kulových ploch. Rovice čočky.
Ústav yzikálího ižeýrství Fakulta strojího ižeýrství VUT v Brě GEOMETRICKÁ OPTIKA Předáška 10 1 Obsah Základy geometrické (paprskové) optiky - Zobrazeí cetrovaou soustavou dvou kulových ploch. Rovice čočky.
1. ZÁKLADY VEKTOROVÉ ALGEBRY 1.1. VEKTOROVÝ PROSTOR A JEHO BÁZE
 1. ZÁKLADY VEKTOROVÉ ALGEBRY 1.1. VEKTOROVÝ PROSTOR A JEHO BÁZE V této kapitole se dozvíte: jak je axiomaticky defiová vektor a vektorový prostor včetě defiice sčítáí vektorů a ásobeí vektorů skalárem;
1. ZÁKLADY VEKTOROVÉ ALGEBRY 1.1. VEKTOROVÝ PROSTOR A JEHO BÁZE V této kapitole se dozvíte: jak je axiomaticky defiová vektor a vektorový prostor včetě defiice sčítáí vektorů a ásobeí vektorů skalárem;
1.7.4 Těžiště, rovnovážná poloha
 74 ěžiště, rovovážá poloha Předpoklady: 00703 Př : Polož si sešit a jede prst tak, aby espadl Záleží a místě, pod kterým sešit podložíš? Proč? Musíme sešit podložit prstem přesě uprostřed, jiak spade Sešit
74 ěžiště, rovovážá poloha Předpoklady: 00703 Př : Polož si sešit a jede prst tak, aby espadl Záleží a místě, pod kterým sešit podložíš? Proč? Musíme sešit podložit prstem přesě uprostřed, jiak spade Sešit
Pravděpodobnostní modely
 Pravděpodobostí modely Meu: QCEpert Pravděpodobostí modely Modul hledá metodou maimálí věrohodosti (MLE Maimum Likelihood Estimate) statistický model (rozděleí) který ejlépe popisuje data. Je přitom k
Pravděpodobostí modely Meu: QCEpert Pravděpodobostí modely Modul hledá metodou maimálí věrohodosti (MLE Maimum Likelihood Estimate) statistický model (rozděleí) který ejlépe popisuje data. Je přitom k
Matematika 1. Katedra matematiky, Fakulta stavební ČVUT v Praze. středa 10-11:40 posluchárna D / 13. Posloupnosti
 Úvod Opakováí Poslouposti Příklady Matematika 1 Katedra matematiky, Fakulta stavebí ČVUT v Praze středa 10-11:40 posluchára D-1122 2012 / 13 Úvod Opakováí Poslouposti Příklady Úvod Opakováí Poslouposti
Úvod Opakováí Poslouposti Příklady Matematika 1 Katedra matematiky, Fakulta stavebí ČVUT v Praze středa 10-11:40 posluchára D-1122 2012 / 13 Úvod Opakováí Poslouposti Příklady Úvod Opakováí Poslouposti
4.5.9 Vznik střídavého proudu
 4.5.9 Vzik střídavého proudu Předpoklady: 4508 Miulá hodia: Pokud se v uzavřeém závitu měí magetický idukčí tok, idukuje se v ěm elektrické apětí =. Př. 1: Vodorově orietovaá smyčka se pohybuje rovoměrě
4.5.9 Vzik střídavého proudu Předpoklady: 4508 Miulá hodia: Pokud se v uzavřeém závitu měí magetický idukčí tok, idukuje se v ěm elektrické apětí =. Př. 1: Vodorově orietovaá smyčka se pohybuje rovoměrě
( + ) ( ) ( ) ( ) ( ) Derivace elementárních funkcí II. Předpoklady: Př. 1: Urči derivaci funkce y = x ; n N.
 ( ) ( ) ( ) ( ) Derivace elementárních funkcí II. Předpoklady: Př. 1: Urči derivaci funkce y = x ; n N.") .. Derivace elemetárích fukcí II Předpoklady: Př. : Urči derivaci fukce y ; N. Budeme postupovat stejě jako předtím dosazeím do vzorce: f ( + ) f ( ) f f ( + ) + + + +... + (biomická věta) + + +... + f
.. Derivace elemetárích fukcí II Předpoklady: Př. : Urči derivaci fukce y ; N. Budeme postupovat stejě jako předtím dosazeím do vzorce: f ( + ) f ( ) f f ( + ) + + + +... + (biomická věta) + + +... + f
Laboratorní práce č. 10 Úloha č. 9. Polarizace světla a Brownův pohyb:
 ruhlář Michal 8.. 5 Laboratorí práce č. Úloha č. 9 Polarizace světla a Browův pohyb: ϕ p, C 4% 97,kPa Úkol: - Staovte polarizačí schopost daého polaroidu - Určete polarimetrem úhel stočeí kmitavé roviy
ruhlář Michal 8.. 5 Laboratorí práce č. Úloha č. 9 Polarizace světla a Browův pohyb: ϕ p, C 4% 97,kPa Úkol: - Staovte polarizačí schopost daého polaroidu - Určete polarimetrem úhel stočeí kmitavé roviy
Matematika NÁRODNÍ SROVNÁVACÍ ZKOUŠKY BŘEZNA 2018
 NÁRODNÍ SROVNÁVACÍ ZKOUŠKY Mtemtik T BŘEZNA 08 :. břez 08 D : 0 P P P : 0 M. M. M. :,8 % S : 0 : 7,5 : -7,5 M. P : -,0 : 0,6 Zopkujte si zákldí iformce ke zkoušce: Test obshuje 0 úloh jeho řešeí máte 90
NÁRODNÍ SROVNÁVACÍ ZKOUŠKY Mtemtik T BŘEZNA 08 :. břez 08 D : 0 P P P : 0 M. M. M. :,8 % S : 0 : 7,5 : -7,5 M. P : -,0 : 0,6 Zopkujte si zákldí iformce ke zkoušce: Test obshuje 0 úloh jeho řešeí máte 90
Matematika NÁRODNÍ SROVNÁVACÍ ZKOUŠKY BŘEZNA 2018
 NÁRODNÍ SROVNÁVACÍ ZKOUŠKY Mtemtik T BŘEZNA 08 : 9. břez 08 D : 897 P P P : 0 M. M. M. :, % S : 0 : 0 : -7,5 M. P : -, : 0, Zopkujte si zákldí iformce ke zkoušce: Test obshuje 0 úloh jeho řešeí máte 90
NÁRODNÍ SROVNÁVACÍ ZKOUŠKY Mtemtik T BŘEZNA 08 : 9. břez 08 D : 897 P P P : 0 M. M. M. :, % S : 0 : 0 : -7,5 M. P : -, : 0, Zopkujte si zákldí iformce ke zkoušce: Test obshuje 0 úloh jeho řešeí máte 90
n=1 ( Re an ) 2 + ( Im a n ) 2 = 0 Im a n = Im a a n definujeme předpisem: n=1 N a n = a 1 + a 2 +... + a N. n=1
 2 + ( Im a n ) 2 = 0 Im a n = Im a a n definujeme předpisem: n=1 N a n = a 1 + a 2 +... + a N. n=1") [M2-P9] KAPITOLA 5: Číselé řady Ozačeí: R, + } = R ( = R) C } = C rozšířeá komplexí rovia ( evlastí hodota, číslo, bod) Vsuvka: defiujeme pro a C: a ± =, a = (je pro a 0), edefiujeme: 0,, ± a Poslouposti
[M2-P9] KAPITOLA 5: Číselé řady Ozačeí: R, + } = R ( = R) C } = C rozšířeá komplexí rovia ( evlastí hodota, číslo, bod) Vsuvka: defiujeme pro a C: a ± =, a = (je pro a 0), edefiujeme: 0,, ± a Poslouposti
základním prvkem teorie křivek v počítačové grafice křivky polynomiální n
 Petra Suryková Modelováí křivek základím prvkem teorie křivek v počítačové grafice křivky polyomiálí Q( t) a a t... a t polyomiálí křivky můžeme sado vyčíslit sado diferecovatelé lze z ich skládat křivky
Petra Suryková Modelováí křivek základím prvkem teorie křivek v počítačové grafice křivky polyomiálí Q( t) a a t... a t polyomiálí křivky můžeme sado vyčíslit sado diferecovatelé lze z ich skládat křivky
23. Mechanické vlnění
 3. Mechaické vlěí Mechaické vlěí je děj, při kterém částice pružého prostředí kmitají kolem svých rovovážých poloh a teto kmitavý pohyb se přeáší (postupuje) od jedé částice k druhé vlěí může vzikout pouze
3. Mechaické vlěí Mechaické vlěí je děj, při kterém částice pružého prostředí kmitají kolem svých rovovážých poloh a teto kmitavý pohyb se přeáší (postupuje) od jedé částice k druhé vlěí může vzikout pouze
Transformace (v OpenGL) příklady a knihovna GLM
 příklady a knihovna GLM") Transforace (v OpenGL) příklady a knihovna GLM Petr Felkel, Jaroslav Sloup Katedra počítačové grafiky a interakce, ČVUT FEL ístnost KN:E-413 (Karlovo náěstí, budova E) E-ail: felkel@fel.cvut.cz Poslední
Transforace (v OpenGL) příklady a knihovna GLM Petr Felkel, Jaroslav Sloup Katedra počítačové grafiky a interakce, ČVUT FEL ístnost KN:E-413 (Karlovo náěstí, budova E) E-ail: felkel@fel.cvut.cz Poslední
Matematika NÁRODNÍ SROVNÁVACÍ ZKOUŠKY ÚNORA 2019
 NÁRODNÍ SROVNÁVACÍ ZKOUŠKY ÚNORA 09 T á D P č P č ů ú P ů ě S á :. úor 09 : 004 : 0 M. M. M. á : 9, % ě č M.. P ů ě ž ó : 0 ž ž ó : 0 ó : -7,5 ž ó : -,8 ó : 4,4 Zopkujte si zákldí iformce ke zkoušce: Test
NÁRODNÍ SROVNÁVACÍ ZKOUŠKY ÚNORA 09 T á D P č P č ů ú P ů ě S á :. úor 09 : 004 : 0 M. M. M. á : 9, % ě č M.. P ů ě ž ó : 0 ž ž ó : 0 ó : -7,5 ž ó : -,8 ó : 4,4 Zopkujte si zákldí iformce ke zkoušce: Test
Téma 2 Přímková a rovinná soustava sil
 Stavebí statka,.ročík bakalářského studa Téma 2 Přímková a rová soustava sl Přímková soustava sl ový svazek sl Statcký momet síly k bodu a dvojce sl v rově Obecá rová soustava sl ová soustava rovoběžých
Stavebí statka,.ročík bakalářského studa Téma 2 Přímková a rová soustava sl Přímková soustava sl ový svazek sl Statcký momet síly k bodu a dvojce sl v rově Obecá rová soustava sl ová soustava rovoběžých
Pracovní listy PRAVOÚHLÁ AXONOMETRIE
 Techická uiverita v Liberci Fakulta řírodovědě-huaití a edagogická Katedra ateatik a didaktik ateatik PRVOÚHLÁ XONOMETRIE Petra Pirklová Liberec, lede 208 2. V ravoúhlé aooetrii obrate růět bodů [2; 5;
Techická uiverita v Liberci Fakulta řírodovědě-huaití a edagogická Katedra ateatik a didaktik ateatik PRVOÚHLÁ XONOMETRIE Petra Pirklová Liberec, lede 208 2. V ravoúhlé aooetrii obrate růět bodů [2; 5;
Popisná statistika - zavedení pojmů. 1 Jednorozměrný statistický soubor s kvantitativním znakem
 Popisá statistika - zavedeí pojmů Popisá statistika - zavedeí pojmů Soubor idividuálích údajů o objektech azýváme základí soubor ebo také populace. Zkoumaé objekty jsou tzv. statistické jedotky a sledujeme
Popisá statistika - zavedeí pojmů Popisá statistika - zavedeí pojmů Soubor idividuálích údajů o objektech azýváme základí soubor ebo také populace. Zkoumaé objekty jsou tzv. statistické jedotky a sledujeme
Přijímací řízení akademický rok 2013/2014 Bc. studium Kompletní znění testových otázek matematika
 Přijímací řízeí akademický rok 0/0 c. studium Kompletí zěí testových otázek matematika Koš Zěí otázky Odpověď a) Odpověď b) Odpověď c) Odpověď d) Správá. Které číslo doplíte místo 8? 6 6 8 C. Které číslo
Přijímací řízeí akademický rok 0/0 c. studium Kompletí zěí testových otázek matematika Koš Zěí otázky Odpověď a) Odpověď b) Odpověď c) Odpověď d) Správá. Které číslo doplíte místo 8? 6 6 8 C. Které číslo
Přijímací řízení akademický rok 2012/2013 Kompletní znění testových otázek matematické myšlení
 Přijímací řízeí akademický rok 0/0 Kompletí zěí testových otázek matematické myšleí Koš Zěí otázky Odpověď a) Odpověď b) Odpověď c) Odpověď d) Správá odpověď. Které číslo doplíte místo otazíku? 6 8 8 6?.
Přijímací řízeí akademický rok 0/0 Kompletí zěí testových otázek matematické myšleí Koš Zěí otázky Odpověď a) Odpověď b) Odpověď c) Odpověď d) Správá odpověď. Které číslo doplíte místo otazíku? 6 8 8 6?.
Matematika přehled vzorců pro maturanty (zpracoval T. Jánský) Úpravy výrazů. Binomická věta
 Úpravy výrazů. Binomická věta") Matematika přehled vzorců pro maturaty (zpracoval T. Jáský) Úpravy výrazů a r. a s = a r+s a r = ar s as a r s = a r.s a. b r = a r b r a b r = ar b r a. b a b = a b = a. b ( a) m = a m m a m. = a a k.
Matematika přehled vzorců pro maturaty (zpracoval T. Jáský) Úpravy výrazů a r. a s = a r+s a r = ar s as a r s = a r.s a. b r = a r b r a b r = ar b r a. b a b = a b = a. b ( a) m = a m m a m. = a a k.
Souřadnicové prostory
 Prostor objektu Tr. objektu Tr. modelu Prostor scény Souřadnicové prostory V V x, y z x, y z z -z x, y Tr. objektu V =V T 1 T n M Tr. modelu Tr. scény x, y Tr. pohledu Tr. scény Tr. pohledu Prostor pozorovatele
Prostor objektu Tr. objektu Tr. modelu Prostor scény Souřadnicové prostory V V x, y z x, y z z -z x, y Tr. objektu V =V T 1 T n M Tr. modelu Tr. scény x, y Tr. pohledu Tr. scény Tr. pohledu Prostor pozorovatele
OKRUŽNÍ A ROZVOZNÍ ÚLOHY: OBCHODNÍ CESTUJÍCÍ. FORMULACE PŘI RESPEKTOVÁNÍ ČASOVÝCH OKEN
 Úloha obchodího cestujícího OKRUŽNÍ A ROZVOZNÍ ÚLOHY: OBCHODNÍ CESTUJÍCÍ. FORMULACE PŘI RESPEKTOVÁNÍ ČASOVÝCH OKEN Nejprve k pojmům používaým v okružích a rozvozích úlohách: HAMILTONŮV CYKLUS je typ cesty,
Úloha obchodího cestujícího OKRUŽNÍ A ROZVOZNÍ ÚLOHY: OBCHODNÍ CESTUJÍCÍ. FORMULACE PŘI RESPEKTOVÁNÍ ČASOVÝCH OKEN Nejprve k pojmům používaým v okružích a rozvozích úlohách: HAMILTONŮV CYKLUS je typ cesty,
Téma 11 Prostorová soustava sil
 Stavebí statka,.ročík bakalářského studa Téma Prostorová soustava sl Prostorový svazek sl Statcký momet síly a dvojce sl v prostoru Obecá prostorová soustava sl Prostorová soustava rovoběžých sl Katedra
Stavebí statka,.ročík bakalářského studa Téma Prostorová soustava sl Prostorový svazek sl Statcký momet síly a dvojce sl v prostoru Obecá prostorová soustava sl Prostorová soustava rovoběžých sl Katedra
Matematika I. Název studijního programu. RNDr. Jaroslav Krieg. 2014 České Budějovice
 Matematika I Název studijího programu RNDr. Jaroslav Krieg 2014 České Budějovice 1 Teto učebí materiál vzikl v rámci projektu "Itegrace a podpora studetů se specifickými vzdělávacími potřebami a Vysoké
Matematika I Název studijího programu RNDr. Jaroslav Krieg 2014 České Budějovice 1 Teto učebí materiál vzikl v rámci projektu "Itegrace a podpora studetů se specifickými vzdělávacími potřebami a Vysoké
3. Lineární diferenciální rovnice úvod do teorie
 3 338 8: Josef Hekrdla lieárí difereciálí rovice úvod do teorie 3 Lieárí difereciálí rovice úvod do teorie Defiice 3 (lieárí difereciálí rovice) Lieárí difereciálí rovice -tého řádu je rovice, která se
3 338 8: Josef Hekrdla lieárí difereciálí rovice úvod do teorie 3 Lieárí difereciálí rovice úvod do teorie Defiice 3 (lieárí difereciálí rovice) Lieárí difereciálí rovice -tého řádu je rovice, která se
Vytápění BT01 TZB II - cvičení
 CZ..07/2.2.00/28.030 Středoevropské cetrum pro vytvářeí a realizaci iovovaých techicko-ekoomických studijích programů Vytápěí BT0 TZB II - cvičeí Zadáí Pro vytápěé místosti vašeho objektu avrhěte otopá
CZ..07/2.2.00/28.030 Středoevropské cetrum pro vytvářeí a realizaci iovovaých techicko-ekoomických studijích programů Vytápěí BT0 TZB II - cvičeí Zadáí Pro vytápěé místosti vašeho objektu avrhěte otopá
1.2. NORMA A SKALÁRNÍ SOUČIN
 2 NORMA A SKALÁRNÍ SOUČIN V této kapitole se dozvíte: axiomatickou defiici ormy vektoru; co je to ormováí vektoru a jak vypadá Euklidovská orma; axiomatickou defiici skalárího (také vitřího) součiu vektorů;
2 NORMA A SKALÁRNÍ SOUČIN V této kapitole se dozvíte: axiomatickou defiici ormy vektoru; co je to ormováí vektoru a jak vypadá Euklidovská orma; axiomatickou defiici skalárího (také vitřího) součiu vektorů;
Předmět: SM 01 ROVINNÉ PŘÍHRADOVÉ KONSTRUKCE
 Přdmět: SM 0 ROVIÉ PŘÍHRADOVÉ KOSTRUKCE doc. Ig. Michl POLÁK, CSc. Fkult stvbí, ČVUT v Prz ROVIÉ PŘÍHRADOVÉ KOSTRUKCE: KOSTRUKCE JE VYTVOŘEA Z PŘÍMÝCH PRUTŮ, PRUTY JSOU AVZÁJEM POSPOJOVÁY V BODECH STYČÍCÍCH,
Přdmět: SM 0 ROVIÉ PŘÍHRADOVÉ KOSTRUKCE doc. Ig. Michl POLÁK, CSc. Fkult stvbí, ČVUT v Prz ROVIÉ PŘÍHRADOVÉ KOSTRUKCE: KOSTRUKCE JE VYTVOŘEA Z PŘÍMÝCH PRUTŮ, PRUTY JSOU AVZÁJEM POSPOJOVÁY V BODECH STYČÍCÍCH,
6 Intervalové odhady. spočteme aritmetický průměr, pak tyto průměry se budou chovat jako by pocházely z normálního. nekonečna.
 6 Itervalové odhady parametrů základího souboru V předchozích kapitolách jsme se zabývali ejprve základím zpracováím experimetálích dat: grafické zobrazeí dat, výpočty výběrových charakteristik kapitola
6 Itervalové odhady parametrů základího souboru V předchozích kapitolách jsme se zabývali ejprve základím zpracováím experimetálích dat: grafické zobrazeí dat, výpočty výběrových charakteristik kapitola
DIFERENCIÁLNÍ POČET FUNKCE JEDNÉ PROMĚNNÉ. 1) Pojem funkce, graf funkce
 Pojem funkce, graf funkce") DIFERENCIÁLNÍ POČET FUNKCE JEDNÉ PROMĚNNÉ ) Pojem ukce, gra ukce De: Fukcí reálé proměé azýváme pravidlo, které každému reálému číslu D přiřazuje právě jedo reálé číslo y H Toto pravidlo začíme ejčastěji
DIFERENCIÁLNÍ POČET FUNKCE JEDNÉ PROMĚNNÉ ) Pojem ukce, gra ukce De: Fukcí reálé proměé azýváme pravidlo, které každému reálému číslu D přiřazuje právě jedo reálé číslo y H Toto pravidlo začíme ejčastěji
Geometrická optika. Zákon odrazu a lomu světla
 Geometrická optika Je auka o optickém zobrazováí. Je vybudováa a 4 zákoech, které vyplyuly z pozorováí a ke kterým epotřebujeme zalosti o podstatě světla: ) přímočaré šířeí světla (paprsky) ) ezávislost
Geometrická optika Je auka o optickém zobrazováí. Je vybudováa a 4 zákoech, které vyplyuly z pozorováí a ke kterým epotřebujeme zalosti o podstatě světla: ) přímočaré šířeí světla (paprsky) ) ezávislost
Matematika NÁRODNÍ SROVNÁVACÍ ZKOUŠKY ÚNORA 2018
 NÁRODNÍ SROVNÁVACÍ ZKOUŠKY Mtemtik T ÚNORA 08 :. úor 08 D : 96 P P P : 0 M. M. : 0 : 0 M. :,4 % S : -7,5 M. P : -,8 : 4,5 Zopkujte si zákldí iformce ke zkoušce: Test obshuje 0 úloh jeho řešeí máte 90 miut
NÁRODNÍ SROVNÁVACÍ ZKOUŠKY Mtemtik T ÚNORA 08 :. úor 08 D : 96 P P P : 0 M. M. : 0 : 0 M. :,4 % S : -7,5 M. P : -,8 : 4,5 Zopkujte si zákldí iformce ke zkoušce: Test obshuje 0 úloh jeho řešeí máte 90 miut
Analýza a zpracování signálů. 4. Diskrétní systémy,výpočet impulsní odezvy, konvoluce, korelace
 Aalýza a zpracováí sigálů 4. Diskrétí systémy,výpočet impulsí odezvy, kovoluce, korelace Diskrétí systémy Diskrétí sytém - zpracovává časově diskrétí vstupí sigál ] a produkuje časově diskrétí výstupí
Aalýza a zpracováí sigálů 4. Diskrétí systémy,výpočet impulsí odezvy, kovoluce, korelace Diskrétí systémy Diskrétí sytém - zpracovává časově diskrétí vstupí sigál ] a produkuje časově diskrétí výstupí
7.2.4 Násobení vektoru číslem
 7..4 Násobeí vektor číslem Předpoklady: 703 Tetokrát začeme hed defiicí. Násobek lového vektor číslem k je lový vektor. Násobek elového vektor = B Ačíslem k je vektor C A, přičemž C je bod, pro který platí:
7..4 Násobeí vektor číslem Předpoklady: 703 Tetokrát začeme hed defiicí. Násobek lového vektor číslem k je lový vektor. Násobek elového vektor = B Ačíslem k je vektor C A, přičemž C je bod, pro který platí:
P R O M Í T Á N Í. rovina π - průmětna vektor s r - směr promítání. a // s r, b// s r,
 P R O M Í T Á N Í Promítání je zobrazení prostorového útvaru do roviny. Je určeno průmětnou a směrem (rovnoběžné) nebo středem (středové) promítání. Princip rovnoběžného promítání rovina π - průmětna vektor
P R O M Í T Á N Í Promítání je zobrazení prostorového útvaru do roviny. Je určeno průmětnou a směrem (rovnoběžné) nebo středem (středové) promítání. Princip rovnoběžného promítání rovina π - průmětna vektor
A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz
![A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz](/thumbs/47/23721460.jpg "A[a 1 ; a 2 ; a 3 ] souřadnice bodu A v kartézské soustavě souřadnic O xyz") 1/15 ANALYTICKÁ GEOMETRIE Základní pojmy: Soustava souřadnic v rovině a prostoru Vzdálenost bodů, střed úsečky Vektory, operace s vektory, velikost vektoru, skalární součin Rovnice přímky Geometrie v rovině
1/15 ANALYTICKÁ GEOMETRIE Základní pojmy: Soustava souřadnic v rovině a prostoru Vzdálenost bodů, střed úsečky Vektory, operace s vektory, velikost vektoru, skalární součin Rovnice přímky Geometrie v rovině
TĚŽIŠTĚ A STABILITA. Těžiště tělesa = bod, kterým stále prochází výslednice tíhových sil všech jeho hmotných bodů, ať těleso natáčíme jakkoli
 SAIKA - těžště ĚŽIŠĚ A SABILIA ěžště tělesa bod, kterým stále prochází výsledce tíhových sl všech jeho hmotých bodů, ať těleso atáčíme jakkol bod, ke kterému astává rovováha mometů způsobeých tíhou jedotlvých
SAIKA - těžště ĚŽIŠĚ A SABILIA ěžště tělesa bod, kterým stále prochází výsledce tíhových sl všech jeho hmotých bodů, ať těleso atáčíme jakkol bod, ke kterému astává rovováha mometů způsobeých tíhou jedotlvých
Transformace (v OpenGL)
") Transformace (v OpenGL) Petr Felkel Katedra počítačové grafiky a interakce, ČVUT FEL místnost KN:E-413 (Karlovo náměstí, budova E) E-mail: felkel@fel.cvut.cz Podle knihy SJ Gortlera: Foundations of Computer
Transformace (v OpenGL) Petr Felkel Katedra počítačové grafiky a interakce, ČVUT FEL místnost KN:E-413 (Karlovo náměstí, budova E) E-mail: felkel@fel.cvut.cz Podle knihy SJ Gortlera: Foundations of Computer
Pružnost a pevnost. 9. přednáška, 11. prosince 2018
 Pružost a pevost 9. předáška, 11. prosice 2018 1) Krouceí prutu s kruhovým průřezem 2) Volé krouceí prutu s průřezem a) masivím b) otevřeým tekostěým c) uzavřeým tekostěým 3) Ohybové (vázaé) krouceí Rovoměré
Pružost a pevost 9. předáška, 11. prosice 2018 1) Krouceí prutu s kruhovým průřezem 2) Volé krouceí prutu s průřezem a) masivím b) otevřeým tekostěým c) uzavřeým tekostěým 3) Ohybové (vázaé) krouceí Rovoměré
Lineární programování
 Lieárí programováí Adjugovaý problém lieárího programováí V případě řešeí problému lieárího programováí LP ma{ c T : A b 0} získáváme výchozí přípustou jedotkovou bázi u doplňkových proměých a za předpokladu
Lieárí programováí Adjugovaý problém lieárího programováí V případě řešeí problému lieárího programováí LP ma{ c T : A b 0} získáváme výchozí přípustou jedotkovou bázi u doplňkových proměých a za předpokladu
Matematika pro real-time grafiku
 Matematika pro real-time grafiku 2005-2011 Josef Pelikán, MFF UK Praha http://cgg.mff.cuni.cz/~pepca/ pepca@cgg.mff.cuni.cz NPGR019, hwmath.pdf 2011 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 59
Matematika pro real-time grafiku 2005-2011 Josef Pelikán, MFF UK Praha http://cgg.mff.cuni.cz/~pepca/ pepca@cgg.mff.cuni.cz NPGR019, hwmath.pdf 2011 Josef Pelikán, http://cgg.mff.cuni.cz/~pepca 1 / 59
p = 6. k k se nazývá inverze v permutaci [ ] MATA P7 Determinanty Motivační příklad: Řešte soustavu rovnic o dvou neznámých: Permutace z n prvků:
![p = 6. k k se nazývá inverze v permutaci [ ] MATA P7 Determinanty Motivační příklad: Řešte soustavu rovnic o dvou neznámých: Permutace z n prvků:](/thumbs/99/141301696.jpg "p = 6. k k se nazývá inverze v permutaci [ ] MATA P7 Determinanty Motivační příklad: Řešte soustavu rovnic o dvou neznámých: Permutace z n prvků:") ATA P Determity otivčí příkld: Řešte soustvu rovic o dvou ezámých: x + x = b x + x = b Permutce z prvků: Je dá moži = {,,, }, kde N Kždá uspořádá -tice [ k, k, k ] vytvořeá z všech prvků možiy se zývá
ATA P Determity otivčí příkld: Řešte soustvu rovic o dvou ezámých: x + x = b x + x = b Permutce z prvků: Je dá moži = {,,, }, kde N Kždá uspořádá -tice [ k, k, k ] vytvořeá z všech prvků možiy se zývá
11. přednáška 16. prosince Úvod do komplexní analýzy.
 11. předáška 16. prosice 009 Úvod do komplexí aalýzy. Tři závěrečé předášky předmětu Matematická aalýza III (NMAI056) jsou věováy úvodu do komplexí aalýzy. Což je adeseá formulace eboť časový rozsah ám
11. předáška 16. prosice 009 Úvod do komplexí aalýzy. Tři závěrečé předášky předmětu Matematická aalýza III (NMAI056) jsou věováy úvodu do komplexí aalýzy. Což je adeseá formulace eboť časový rozsah ám
1.1 Napište středovou rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem
 Analytická geometrie - kružnice Napište středovou rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem A = ; 5 [ ] Napište středový i obecný tvar rovnice kružnice, která má střed
Analytická geometrie - kružnice Napište středovou rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem A = ; 5 [ ] Napište středový i obecný tvar rovnice kružnice, která má střed
Funkce. RNDr. Yvetta Bartáková. Gymnázium, SOŠ a VOŠ Ledeč nad Sázavou
 Fukce RNDr. Yvetta Bartáková Gymázium, SOŠ a VOŠ Ledeč ad Sázavou Limita poslouposti a fukce VY INOVACE_0 9_M Gymázium, SOŠ a VOŠ Ledeč ad Sázavou A) Limita poslouposti Říkáme, že posloupost a je kovergetí,
Fukce RNDr. Yvetta Bartáková Gymázium, SOŠ a VOŠ Ledeč ad Sázavou Limita poslouposti a fukce VY INOVACE_0 9_M Gymázium, SOŠ a VOŠ Ledeč ad Sázavou A) Limita poslouposti Říkáme, že posloupost a je kovergetí,
Eukleidovský prostor a KSS Eukleidovský prostor je bodový prostor, ve kterém je definována vzdálenost dvou bodů (metrika)
") Eukleidovský prostor a KSS Eukleidovský prostor je bodový prostor, ve kterém je definována vzdálenost dvou bodů (metrika) Kartézská soustava souřadnic je dána počátkem O a uspořádanou trojicí bodů E x,
Eukleidovský prostor a KSS Eukleidovský prostor je bodový prostor, ve kterém je definována vzdálenost dvou bodů (metrika) Kartézská soustava souřadnic je dána počátkem O a uspořádanou trojicí bodů E x,
Matematika 1 MA1. 1 Analytická geometrie v prostoru - základní pojmy. 4 Vzdálenosti. 12. přednáška ( ) Matematika 1 1 / 32
 Matematika 1 1 / 32") Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
Matematika 1 12. přednáška MA1 1 Analytická geometrie v prostoru - základní pojmy 2 Skalární, vektorový a smíšený součin, projekce vektoru 3 Přímky a roviny 4 Vzdálenosti 5 Příčky mimoběžek 6 Zkouška;
BSI. Trámové botky s vnitřními křidélky Trojrozměrná spojovací deska z uhlíkové oceli s galvanickým zinkováním BSI - 01 ÚČINNÉ ODKLONĚNÝ OHYB
 SI Trámové botky s vitřími křidélky Trojrozměrá spojovací deska z uhlíkové oceli s galvaickým zikováím ÚČINNÉ Stadardizovaý, certifikovaý, rychlý a ekoomický systém OLASTI POUŽITÍ Smykové spoje dřevo-dřevo,
SI Trámové botky s vitřími křidélky Trojrozměrá spojovací deska z uhlíkové oceli s galvaickým zikováím ÚČINNÉ Stadardizovaý, certifikovaý, rychlý a ekoomický systém OLASTI POUŽITÍ Smykové spoje dřevo-dřevo,
Číslicové filtry. Použití : Analogové x číslicové filtry : Analogové. Číslicové: Separace signálů Restaurace signálů
 Číslicová filtrace Použití : Separace sigálů Restaurace sigálů Číslicové filtry Aalogové x číslicové filtry : Aalogové Číslicové: + levé + rychlé + velký dyamický rozsah (v amplitudě i frekveci) - evhodé
Číslicová filtrace Použití : Separace sigálů Restaurace sigálů Číslicové filtry Aalogové x číslicové filtry : Aalogové Číslicové: + levé + rychlé + velký dyamický rozsah (v amplitudě i frekveci) - evhodé
2. Vyplňování. Transformace.
 2. Vplňování, transformace Cíl Po prostudování této kapitol budete umět vplňovat a šrafovat ohraničenou oblast zobrazovat objekt 3D do rovin odvodit vztah pro zobrazení 3D objektů do rovin Výklad 2.. Algoritm
2. Vplňování, transformace Cíl Po prostudování této kapitol budete umět vplňovat a šrafovat ohraničenou oblast zobrazovat objekt 3D do rovin odvodit vztah pro zobrazení 3D objektů do rovin Výklad 2.. Algoritm
IAJCE Přednáška č. 12
 Složitost je úvod do problematiky Úvod praktická realizace algoritmu = omezeí zejméa: o časem o velikostí paměti složitost = vztah daého algoritmu k daým prostředkům: časová složitost každé možiě vstupích
Složitost je úvod do problematiky Úvod praktická realizace algoritmu = omezeí zejméa: o časem o velikostí paměti složitost = vztah daého algoritmu k daým prostředkům: časová složitost každé možiě vstupích
1.1. Definice Reálným vektorovým prostorem nazýváme množinu V, pro jejíž prvky jsou definovány operace sčítání + :V V V a násobení skalárem : R V V
 Předáška 1: Vektorové prostory Vektorový prostor Pro abstraktí defiici vektorového prostoru jsou podstaté vlastosti dvou operací, sčítáí vektorů a ásobeí vektoru (reálým číslem) Tyto dvě operace musí být
Předáška 1: Vektorové prostory Vektorový prostor Pro abstraktí defiici vektorového prostoru jsou podstaté vlastosti dvou operací, sčítáí vektorů a ásobeí vektoru (reálým číslem) Tyto dvě operace musí být
Matematika I, část II
 1. FUNKCE Průvodce studiem V deím životě, v přírodě, v techice a hlavě v matematice se eustále setkáváme s fukčími závislostmi jedé veličiy (apř. y) a druhé (apř. x). Tak apř. cea jízdeky druhé třídy osobího
1. FUNKCE Průvodce studiem V deím životě, v přírodě, v techice a hlavě v matematice se eustále setkáváme s fukčími závislostmi jedé veličiy (apř. y) a druhé (apř. x). Tak apř. cea jízdeky druhé třídy osobího
Předmět BROB - Robotika. 4 Kvaternionová matematika
 Předmět BROB - Robotika Jméno Ročník Řeháček Tomáš 136580, Blaha Vít 136503, Michna Jakub 134560 2 Studijní skupina AMT Kontroloval Hodnocení Dne 30.4.2012 Číslo úlohy Název úlohy 4 Kvaternionová matematika
Předmět BROB - Robotika Jméno Ročník Řeháček Tomáš 136580, Blaha Vít 136503, Michna Jakub 134560 2 Studijní skupina AMT Kontroloval Hodnocení Dne 30.4.2012 Číslo úlohy Název úlohy 4 Kvaternionová matematika
Kruhový diagram. 1. Z odečtených hodnot pro jmenovité primární napětí nakreslete kruhový diagram. Asynchronní motor. P n =2kW n =905ot/min
 TO - VŠB FE Datum měřeí E L E K T R C K É Kruhový diagram S T R O J E říjmeí Jméo Supia (hodoceí). Z odečteých hodot pro jmeovité primárí apětí areslete ruhový diagram.. Schéma zapojeí ;~;5Hz;x/4V L L
TO - VŠB FE Datum měřeí E L E K T R C K É Kruhový diagram S T R O J E říjmeí Jméo Supia (hodoceí). Z odečteých hodot pro jmeovité primárí apětí areslete ruhový diagram.. Schéma zapojeí ;~;5Hz;x/4V L L
stručná osnova jarní semestr podzimní semestr
 Brýlová optika stručá osova jarí semestr základy geometrické optiky pro brýlovou optiku Gullstradovo schématické oko, další modely, otoreceptory oka, vizus, optotypy myopie, hypermetropie, aakie a jejich
Brýlová optika stručá osova jarí semestr základy geometrické optiky pro brýlovou optiku Gullstradovo schématické oko, další modely, otoreceptory oka, vizus, optotypy myopie, hypermetropie, aakie a jejich
Závislost slovních znaků
 Závislost slovích zaků Závislost slovích (kvalitativích) zaků Obměy slovího zaku Alterativí zaky Možé zaky Tříděí věcé sloví řady: seřazeí obmě je subjektiví záležitostí (podle abecedy), možé i objektiví
Závislost slovích zaků Závislost slovích (kvalitativích) zaků Obměy slovího zaku Alterativí zaky Možé zaky Tříděí věcé sloví řady: seřazeí obmě je subjektiví záležitostí (podle abecedy), možé i objektiví
ARITMETICKÉ POSLOUPNOSTI VYŠŠÍCH ŘÁDŮ
 ARITMETICKÉ POSLOUPNOSTI VYŠŠÍCH ŘÁDŮ JAROSLAV ZHOUF Pedagogická fakulta UK Praha Osova předášky 1. Vysvětleí pojmu Aritmetické poslouposti vyšších řádů (APVŘ). APVŘ a ižším gymáziu 3. APVŘ a vyšším gymáziu
ARITMETICKÉ POSLOUPNOSTI VYŠŠÍCH ŘÁDŮ JAROSLAV ZHOUF Pedagogická fakulta UK Praha Osova předášky 1. Vysvětleí pojmu Aritmetické poslouposti vyšších řádů (APVŘ). APVŘ a ižším gymáziu 3. APVŘ a vyšším gymáziu
Důkazy Ackermannova vzorce
 Důkazy Akermaova vzore Rady studetům: Důkaz je trohu zdlouhavý, ale přirozeý. Tak byste při odvozeí postupovali, kdybyste vzore předem ezali. Důkaz je krátký, ale je založe a triku, a který byste předem
Důkazy Akermaova vzore Rady studetům: Důkaz je trohu zdlouhavý, ale přirozeý. Tak byste při odvozeí postupovali, kdybyste vzore předem ezali. Důkaz je krátký, ale je založe a triku, a který byste předem
Geometrické transformace pomocí matic
 Geometrické transformace pomocí matic Pavel Strachota FJFI ČVUT v Praze 2. dubna 2010 Obsah 1 Úvod 2 Geometrické transformace ve 2D 3 Geometrické transformace ve 3D Obsah 1 Úvod 2 Geometrické transformace
Geometrické transformace pomocí matic Pavel Strachota FJFI ČVUT v Praze 2. dubna 2010 Obsah 1 Úvod 2 Geometrické transformace ve 2D 3 Geometrické transformace ve 3D Obsah 1 Úvod 2 Geometrické transformace
Abstrakt. Co jsou to komplexní čísla? K čemu se používají? Dá se s nimi dělat
 Komplexí čísla Hoza Krejčí Abstrakt. Co jsou to komplexí čísla? K čemu se používají? Dá se s imi dělat ěco cool? Na tyto a další otázky se a předášce/v příspěvku pokusíme odpovědět. Proč vzikla komplexí
Komplexí čísla Hoza Krejčí Abstrakt. Co jsou to komplexí čísla? K čemu se používají? Dá se s imi dělat ěco cool? Na tyto a další otázky se a předášce/v příspěvku pokusíme odpovědět. Proč vzikla komplexí
ZÁKLADNÍ POJMY OPTIKY
 Záš pojmy A. Popiš aspoň jede fyzikálí experimet měřeí rychlosti světla. - viz apříklad Michelsoův, Fizeaův, Roemerův pokus. Defiuj a popiš fyzikálí veličiu idex lomu. - je to bezrozměrá fyzikálí veličia
Záš pojmy A. Popiš aspoň jede fyzikálí experimet měřeí rychlosti světla. - viz apříklad Michelsoův, Fizeaův, Roemerův pokus. Defiuj a popiš fyzikálí veličiu idex lomu. - je to bezrozměrá fyzikálí veličia
Prorážka DOC. ING. PAVEL HÁNEK, CSC. Uvedené materiály jsou doplňkem přednášek předmětu 154GP10
 Prorážka DOC. ING. PAVEL HÁNEK, CSC. Uvedeé materiály jsou doplňkem předášek předmětu 154GP10 014 HLAVNÍ PROJEKČNÍ PRVKY Směr pokud možo volit přímý tuel. U siličích t. miimálí poloměr 300 m, u železičích
Prorážka DOC. ING. PAVEL HÁNEK, CSC. Uvedeé materiály jsou doplňkem předášek předmětu 154GP10 014 HLAVNÍ PROJEKČNÍ PRVKY Směr pokud možo volit přímý tuel. U siličích t. miimálí poloměr 300 m, u železičích
= + nazýváme tečnou ke grafu funkce f
 D E R I V A C E F U N KCE Deiice. (derivace Buď ukce,!. Eistuje-li limitu derivací ukce v bodě a začíme ji (. lim ( + lim Deiice. (teča a ormála Přímku o rovici y ( v bodě, přímku o rovici y ( (, kde (
D E R I V A C E F U N KCE Deiice. (derivace Buď ukce,!. Eistuje-li limitu derivací ukce v bodě a začíme ji (. lim ( + lim Deiice. (teča a ormála Přímku o rovici y ( v bodě, přímku o rovici y ( (, kde (
Momenty setrvačnosti a deviační momenty
 Momenty setrvačnosti a deviační momenty Momenty setrvačnosti a deviační momenty charakterizují spolu shmotností a statickými momenty hmoty rozložení hmotnosti tělesa vprostoru. Jako takové se proto vyskytují
Momenty setrvačnosti a deviační momenty Momenty setrvačnosti a deviační momenty charakterizují spolu shmotností a statickými momenty hmoty rozložení hmotnosti tělesa vprostoru. Jako takové se proto vyskytují
Rovinné přetvoření. Posunutí (translace) TEORIE K M2A+ULA
 TEORIE K M2A+ULA") Rovinné přetvoření Rovinné přetvoření, neboli, jak se také často nazývá, geometrická transformace je vlastně lineární zobrazení v prostoru s nějakou soustavou souřadnic. Jde v něm o přepočet souřadnic
Rovinné přetvoření Rovinné přetvoření, neboli, jak se také často nazývá, geometrická transformace je vlastně lineární zobrazení v prostoru s nějakou soustavou souřadnic. Jde v něm o přepočet souřadnic
Obecná soustava sil a momentů v prostoru
 becá soustava sil a mometů v prostoru Zcela obecé atížeí silami a momet a těleso v prostoru (vede a 6 rovic) Saha o převráceí (akce) Specifické případ Vikla u obce Kadov, ~30 t Svaek sil paprsk všech sil
becá soustava sil a mometů v prostoru Zcela obecé atížeí silami a momet a těleso v prostoru (vede a 6 rovic) Saha o převráceí (akce) Specifické případ Vikla u obce Kadov, ~30 t Svaek sil paprsk všech sil
CVIČNÝ TEST 15. OBSAH I. Cvičný test 2. Mgr. Tomáš Kotler. II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17
 CVIČNÝ TEST 15 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST VÝCHOZÍ TEXT K ÚLOZE 1 Je dána čtvercová mřížka, v níž každý čtverec má délku
CVIČNÝ TEST 15 Mgr. Tomáš Kotler OBSAH I. Cvičný test 2 II. Autorské řešení 6 III. Klíč 15 IV. Záznamový list 17 I. CVIČNÝ TEST VÝCHOZÍ TEXT K ÚLOZE 1 Je dána čtvercová mřížka, v níž každý čtverec má délku
Iterační metody řešení soustav lineárních rovnic
 Iteračí metody řešeí soustav lieárích rovic Matice je: diagoálě domiatí právě tehdy, když pozitivě defiití (symetrická matice) právě tehdy, když pro x platí x, Ax a ij Tyto vlastosti budou důležité pro
Iteračí metody řešeí soustav lieárích rovic Matice je: diagoálě domiatí právě tehdy, když pozitivě defiití (symetrická matice) právě tehdy, když pro x platí x, Ax a ij Tyto vlastosti budou důležité pro
6. Posloupnosti a jejich limity, řady
 Moderí techologie ve studiu aplikovaé fyziky CZ..07/..00/07.008 6. Poslouposti a jejich limity, řady Posloupost je speciálí, důležitý příklad fukce. Při praktickém měřeí hodot určité fyzikálí veličiy dostáváme
Moderí techologie ve studiu aplikovaé fyziky CZ..07/..00/07.008 6. Poslouposti a jejich limity, řady Posloupost je speciálí, důležitý příklad fukce. Při praktickém měřeí hodot určité fyzikálí veličiy dostáváme
obecná rovnice kružnice a x 2 b y 2 c x d y e=0 1. Napište rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem A[-3;2].
![obecná rovnice kružnice a x 2 b y 2 c x d y e=0 1. Napište rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem A[-3;2].](/thumbs/59/44051949.jpg "obecná rovnice kružnice a x 2 b y 2 c x d y e=0 1. Napište rovnici kružnice, která má střed v počátku soustavy souřadnic a prochází bodem A[-3;2].") Kružnice množina bodů, které mají od středu stejnou vzdálenost pojmy: bod na kružnici X [x, y]; poloměr kružnice r pro střed S[0; 0]: SX =r x 0 2 y 0 2 =r x 2 y 2 =r 2 pro střed S[m; n]: SX =r x m 2 y
Kružnice množina bodů, které mají od středu stejnou vzdálenost pojmy: bod na kružnici X [x, y]; poloměr kružnice r pro střed S[0; 0]: SX =r x 0 2 y 0 2 =r x 2 y 2 =r 2 pro střed S[m; n]: SX =r x m 2 y
1.3. POLYNOMY. V této kapitole se dozvíte:
 1.3. POLYNOMY V této kapitole se dozvíte: co rozumíme pod pojmem polyom ebo-li mohočle -tého stupě jak provádět základí početí úkoy s polyomy, kokrétě součet a rozdíl polyomů, ásobeí, umocňováí a děleí
1.3. POLYNOMY V této kapitole se dozvíte: co rozumíme pod pojmem polyom ebo-li mohočle -tého stupě jak provádět základí početí úkoy s polyomy, kokrétě součet a rozdíl polyomů, ásobeí, umocňováí a děleí
stručná osnova jarní semestr podzimní semestr
 Brýlová optika stručá osova jarí semestr základy geometrické optiky pro brýlovou optiku Gullstradovo schématické oko, další modely, otoreceptory oka, vizus, optotypy myopie, hypermetropie, aakie a jejich
Brýlová optika stručá osova jarí semestr základy geometrické optiky pro brýlovou optiku Gullstradovo schématické oko, další modely, otoreceptory oka, vizus, optotypy myopie, hypermetropie, aakie a jejich
Matice. Je dána matice A R m,n, pak máme zobrazení A : R n R m.
 Matice lineárních zobrazení [1] Připomenutí Zobrazení A : L 1 L 2 je lineární, když A( x + y ) = A( x ) + A( y ), A(α x ) = α A( x ). Což je ekvivalentní s principem superpozice: A(α 1 x 1 + + α n x n
Matice lineárních zobrazení [1] Připomenutí Zobrazení A : L 1 L 2 je lineární, když A( x + y ) = A( x ) + A( y ), A(α x ) = α A( x ). Což je ekvivalentní s principem superpozice: A(α 1 x 1 + + α n x n
Ing. Vladimíra Michalcová, Ph.D. Katedra stavební mechaniky (228)
") Stavebí statka - vyučující Dooručeá lteratura Ig. Vladmíra chalcová, h.d. Katedra stavebí mechaky (228) místost: LH 47/ tel.: (59 732) 348 e mal: vladmra.mchalcova@vsb.c www: htt://fast.vsb.c/mchalcova
Stavebí statka - vyučující Dooručeá lteratura Ig. Vladmíra chalcová, h.d. Katedra stavebí mechaky (228) místost: LH 47/ tel.: (59 732) 348 e mal: vladmra.mchalcova@vsb.c www: htt://fast.vsb.c/mchalcova
Hierarchický model. 1995-2013 Josef Pelikán CGG MFF UK Praha. pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ 1 / 16
 Hierarchický model 1995-2013 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ 1 / 16 Hierarchie v 3D modelování kompozice zdola-nahoru složitější objekty se sestavují
Hierarchický model 1995-2013 Josef Pelikán CGG MFF UK Praha pepca@cgg.mff.cuni.cz http://cgg.mff.cuni.cz/~pepca/ 1 / 16 Hierarchie v 3D modelování kompozice zdola-nahoru složitější objekty se sestavují
Těžiště a moment setrvačnosti Nalezení práce polohy těžiště a momentu setrvačnosti vůči zadané ose u homogenních těles v třírozměrném prostoru.
 Těžiště a momet setrvačosti Naleeí práce polohy těžiště a mometu setrvačosti vůči adaé ose u homogeích těles v tříroměrém prostoru. Př. 1 Najděte těžiště a momet setrvačosti kulové vrstvy vůči rotačí ose
Těžiště a momet setrvačosti Naleeí práce polohy těžiště a mometu setrvačosti vůči adaé ose u homogeích těles v tříroměrém prostoru. Př. 1 Najděte těžiště a momet setrvačosti kulové vrstvy vůči rotačí ose
Mgr. Tomáš Kotler. I. Cvičný test 2 II. Autorské řešení 7 III. Klíč 15 IV. Záznamový list 17
 Mgr. Tomáš Kotler I. Cvičný test 2 II. Autorské řešení 7 III. Klíč 15 IV. Záznamový list 17 VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Je dán rovinný obrazec, v obrázku vyznačený barevnou výplní, který představuje
Mgr. Tomáš Kotler I. Cvičný test 2 II. Autorské řešení 7 III. Klíč 15 IV. Záznamový list 17 VÝCHOZÍ TEXT A OBRÁZEK K ÚLOZE 1 Je dán rovinný obrazec, v obrázku vyznačený barevnou výplní, který představuje
pro bakalářský studijní program Ekonomika a management
 B608 Ekoomika a maagemet POŢADAVKY K PŘIJÍMACÍ ZKOUŠCE pro bakalářský studijí program Ekoomika a maagemet MATEMATIKA 1. Počítáí s reálými čísly Zlomky, mociy, odmociy, ( a b), ( a b), a b.. Počítáí s procety
B608 Ekoomika a maagemet POŢADAVKY K PŘIJÍMACÍ ZKOUŠCE pro bakalářský studijí program Ekoomika a maagemet MATEMATIKA 1. Počítáí s reálými čísly Zlomky, mociy, odmociy, ( a b), ( a b), a b.. Počítáí s procety
Matematika 1. Ivana Pultarová Katedra matematiky, Fakulta stavební ČVUT v Praze. středa 10-11:40 posluchárna D Posloupnosti
 Úvod Opakováí Poslouposti Příklady Matematika 1 Ivaa Pultarová Katedra matematiky, Fakulta stavebí ČVUT v Praze středa 10-11:40 posluchára D-1122 Úvod Opakováí Poslouposti Příklady Úvod Opakováí Poslouposti
Úvod Opakováí Poslouposti Příklady Matematika 1 Ivaa Pultarová Katedra matematiky, Fakulta stavebí ČVUT v Praze středa 10-11:40 posluchára D-1122 Úvod Opakováí Poslouposti Příklady Úvod Opakováí Poslouposti
Napěťový vektor 3d. Díky Wikipedia za obrázek. n n n
 Míry napětí Napěťový vektor 3d n n2 2 n,. n n n Zatížené těleso rozdělíme myšleným řezem na dvě části. Na malou plošku v okolí materiálového bodu P působí napěťový vektor (n) (n, x, t), který je spojitou
Míry napětí Napěťový vektor 3d n n2 2 n,. n n n Zatížené těleso rozdělíme myšleným řezem na dvě části. Na malou plošku v okolí materiálového bodu P působí napěťový vektor (n) (n, x, t), který je spojitou
ROTAČNÍ PLOCHY. 1) Základní pojmy
 Základní pojmy") ROTAČNÍ PLOCHY 1) Základní pojmy Rotační plocha vznikne rotací tvořicí křivky k kolem osy o. Pro zobrazení a konstrukce bude výhodnější nechat rotovat jednotlivé body tvořicí křivky. Trajektorii rotujícího
ROTAČNÍ PLOCHY 1) Základní pojmy Rotační plocha vznikne rotací tvořicí křivky k kolem osy o. Pro zobrazení a konstrukce bude výhodnější nechat rotovat jednotlivé body tvořicí křivky. Trajektorii rotujícího
jsou reálná a m, n jsou čísla přirozená.
 .7.5 Racioálí a polomické fukce Předpoklad: 704 Pedagogická pozámka: Při opisováí defiic racioálí a polomické fukce si ěkteří studeti stěžovali, že je to příliš těžké. Ve skutečosti je sstém, kterým jsou
.7.5 Racioálí a polomické fukce Předpoklad: 704 Pedagogická pozámka: Při opisováí defiic racioálí a polomické fukce si ěkteří studeti stěžovali, že je to příliš těžké. Ve skutečosti je sstém, kterým jsou
1 Základy Z-transformace. pro aplikace v oblasti
 Základy Z-trasformace pro aplikace v oblasti číslicového zpracováí sigálů Petr Pollák 9. říja 29 Základy Z-trasformace Teto stručý text slouží k připomeutí základích vlastostí Z-trasformace s jejími aplikacemi
Základy Z-trasformace pro aplikace v oblasti číslicového zpracováí sigálů Petr Pollák 9. říja 29 Základy Z-trasformace Teto stručý text slouží k připomeutí základích vlastostí Z-trasformace s jejími aplikacemi
UNIVERZITA PALACKÉHO V OLOMOUCI PŘÍRODOVĚDECKÁ FAKULTA
 UNIVERZIT PLCKÉHO V OLOMOUCI PŘÍROOVĚECKÁ FKULT KTER LGEBRY GEOMETRIE OSVĚTLENÍ VE STŘEOVÉM PROMÍTÁNÍ LINEÁRNÍ PERSPEKTIVĚ Bakalářká práce Vedoucí práce: RNr. Leka Juklová, Ph.. Rok odevdáí 202 Vypracovala:
UNIVERZIT PLCKÉHO V OLOMOUCI PŘÍROOVĚECKÁ FKULT KTER LGEBRY GEOMETRIE OSVĚTLENÍ VE STŘEOVÉM PROMÍTÁNÍ LINEÁRNÍ PERSPEKTIVĚ Bakalářká práce Vedoucí práce: RNr. Leka Juklová, Ph.. Rok odevdáí 202 Vypracovala: